| Modell | R12-135S | |
| Roboterarmnetz Acht (ohne Kabel) |
36 kg | |
| Nutzlast: XNUMX Kg | 12 kg | |
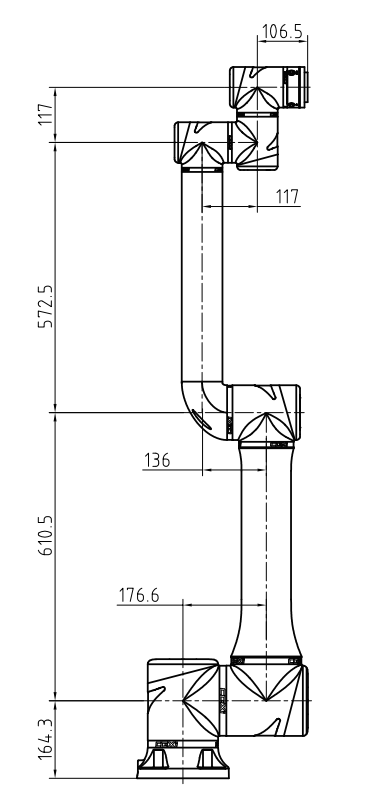
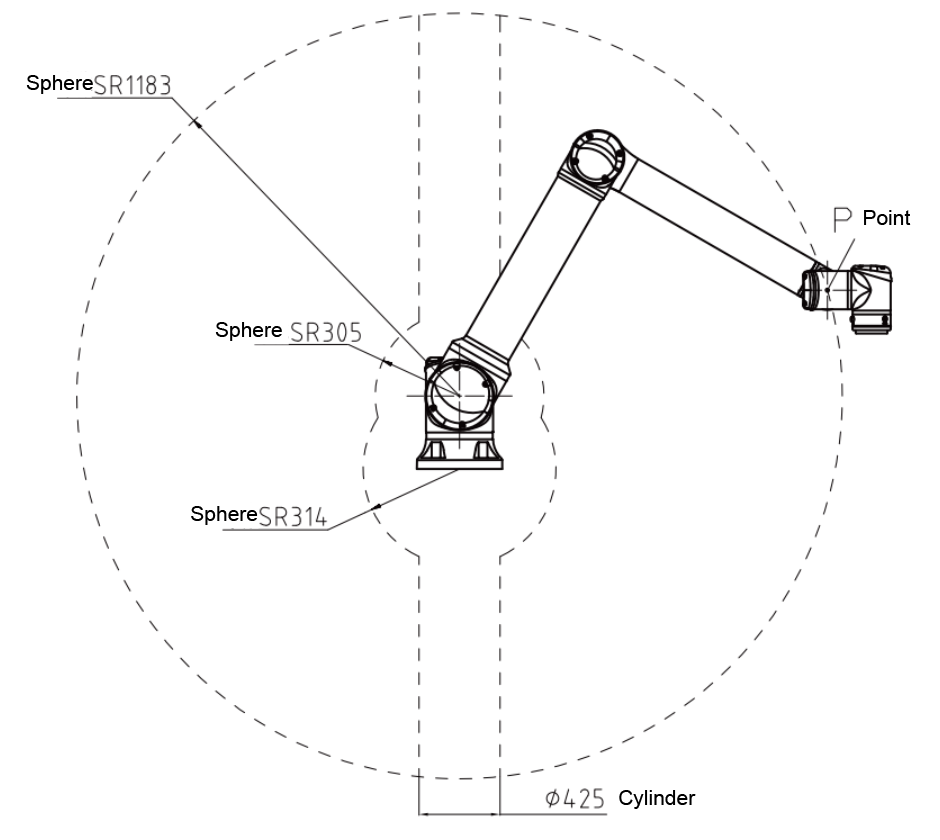
| Armlänge | 1300 mm | |
| Freiheitsgrad | 6 | |
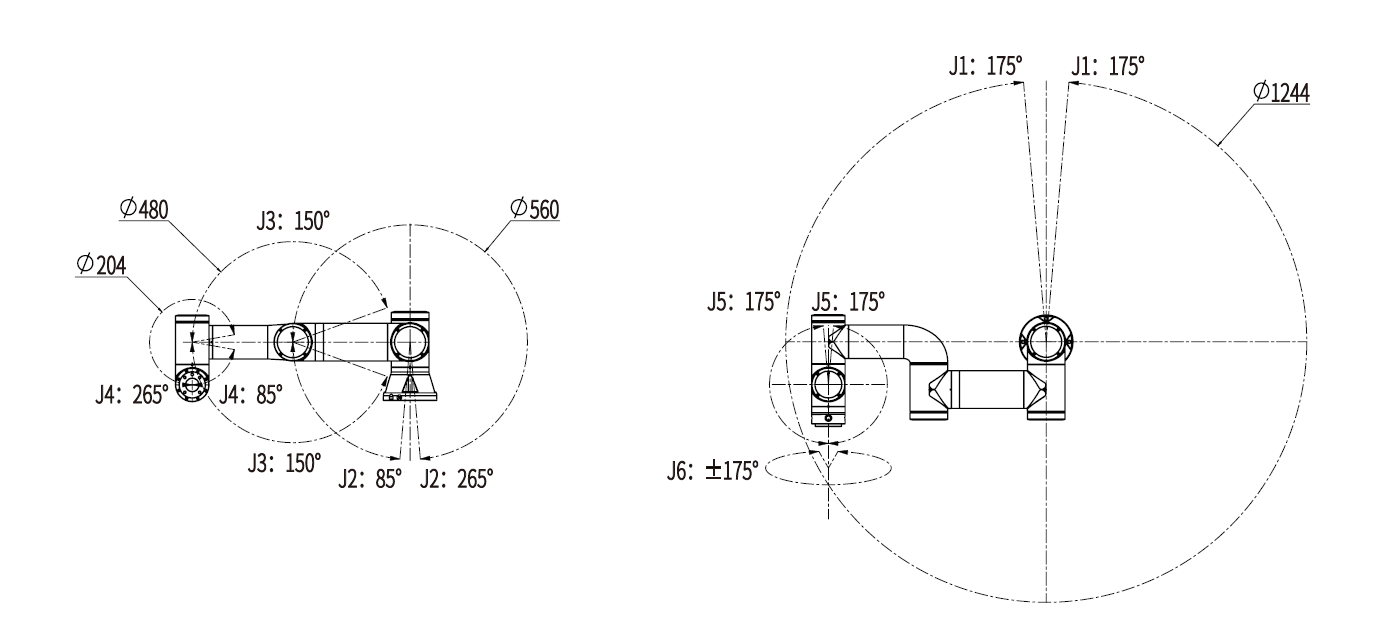
| Bewegung Abdeckung |
Gelenk 1 | ± 360 ° |
| 2 Dichtungs | ± 360 ° | |
| 3 Dichtungs | ± 165 ° | |
| 4 Dichtungs | ± 360 ° | |
| 5 Dichtungs | ± 360 ° | |
| 6 Dichtungs | ± 360 ° | |
| Bewegung Schnelligkeit |
Gelenk 1 | 150 ° / s |
| 2 Dichtungs | 150 ° / s | |
| 3 Dichtungs | 210 ° / s | |
| 4 Dichtungs | 240 ° / s | |
| 5 Dichtungs | 240 ° / s | |
| 6 Dichtungs | 240 ° / s | |
| EOA Höchstgeschwindigkeit | 3m / s | |
| Wiederholgenauigkeit der Positionierung (maximal) | ± 0.03mm | |
| Absolute Positionierungsgenauigkeit (maximal) | 0.5 mm | |
| Bus/Frequenz steuern | EtherCAT/1kHz | |
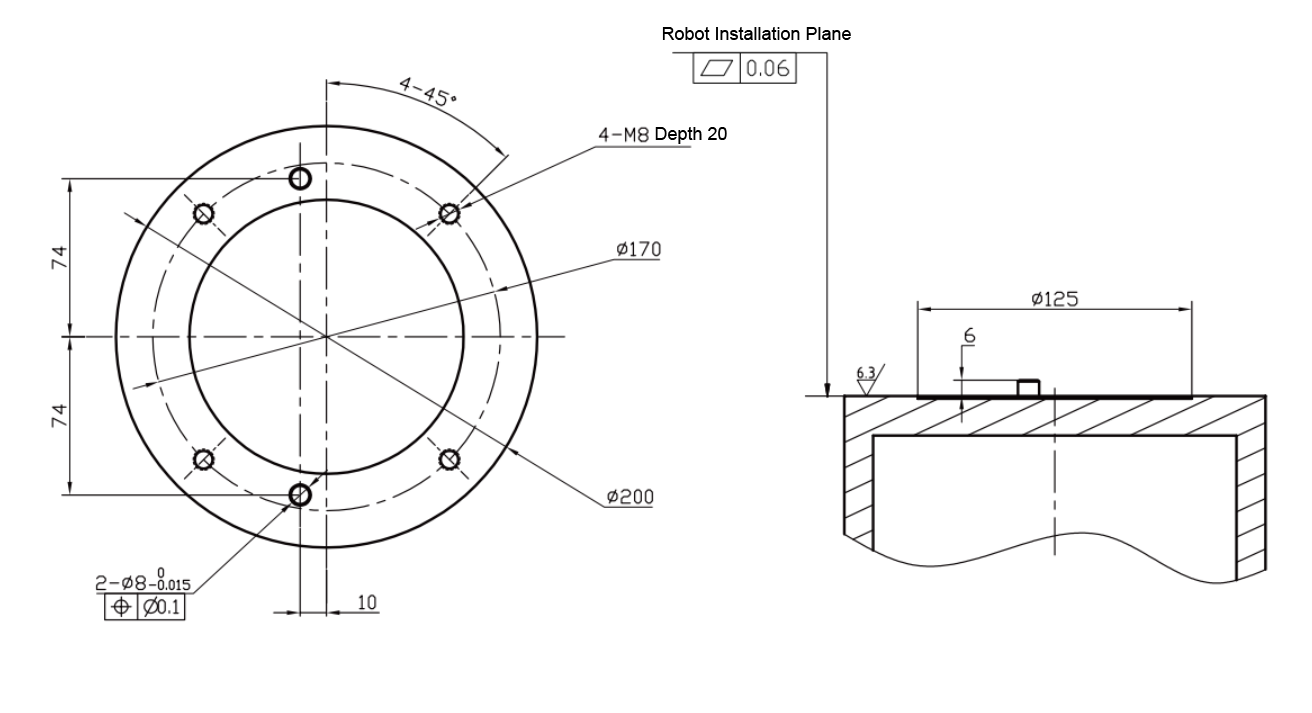
| Installationsmethode | beliebiger Winkel | |
| Typische Leistung | 550W | |
| Werkstoff | Aluminiumlegierung | |
| Umgebungstemperatur | -5 ° C ~ 55 ° C | |
| Arbeitsumgebung (Luftfeuchtigkeit) | 5% ~ 90% rF (keine Kondensation) |
|
| Kabellänge | 6m | |
| IP-GRADE | IP65 | |
| Lärm | ≤60dB | |
| Tool-End-IO-Port | digitaler Eingang*2, digitaler Ausgang*2, Analogeingang*2, Ausgangsstromversorgung24V/1A*1 |
|
| Werkzeug Kommunikationsport beenden | EtherCAT*1, RS485*1, Ausgangsstromversorgung24V/1A*1 |
|