Le bras cobot est principalement utilisé pour la manutention, la palettisation, le pick and place, ainsi que le soudage à l'arc, avec une grande fiabilité et d'excellentes performances.
| Modèle | XR18-EX-138S (antidéflagrant) |
|
| Filet de bras de robot huit (sans câbles) |
35kg | |
| Charge utile | 18kg | |
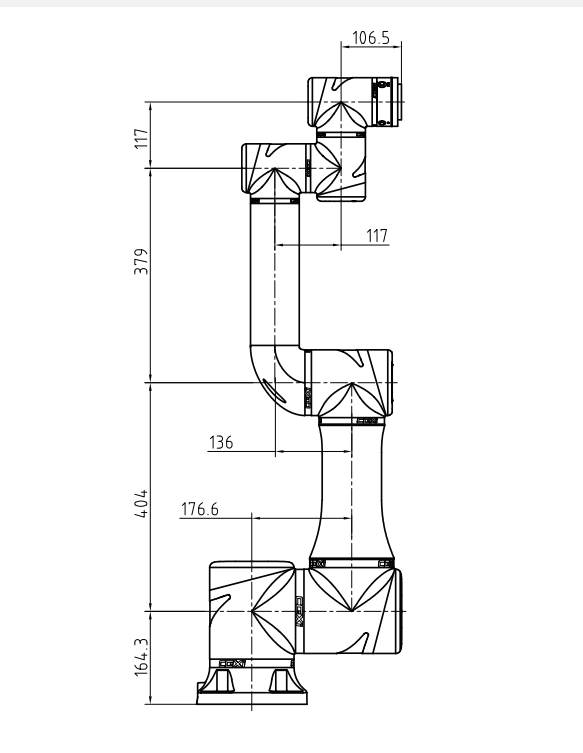
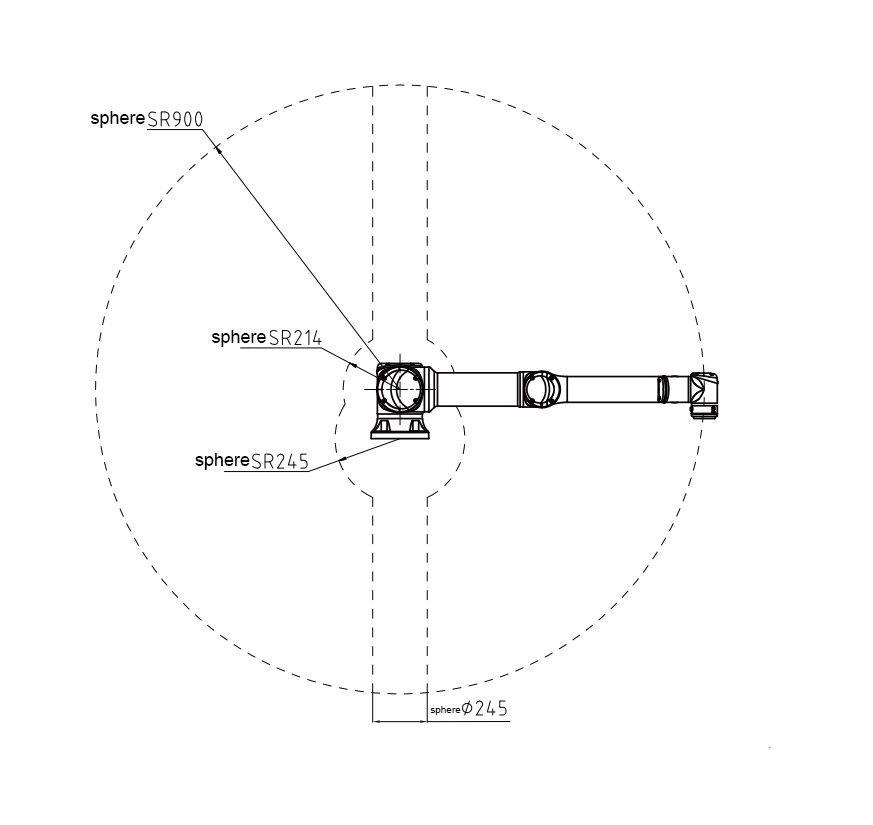
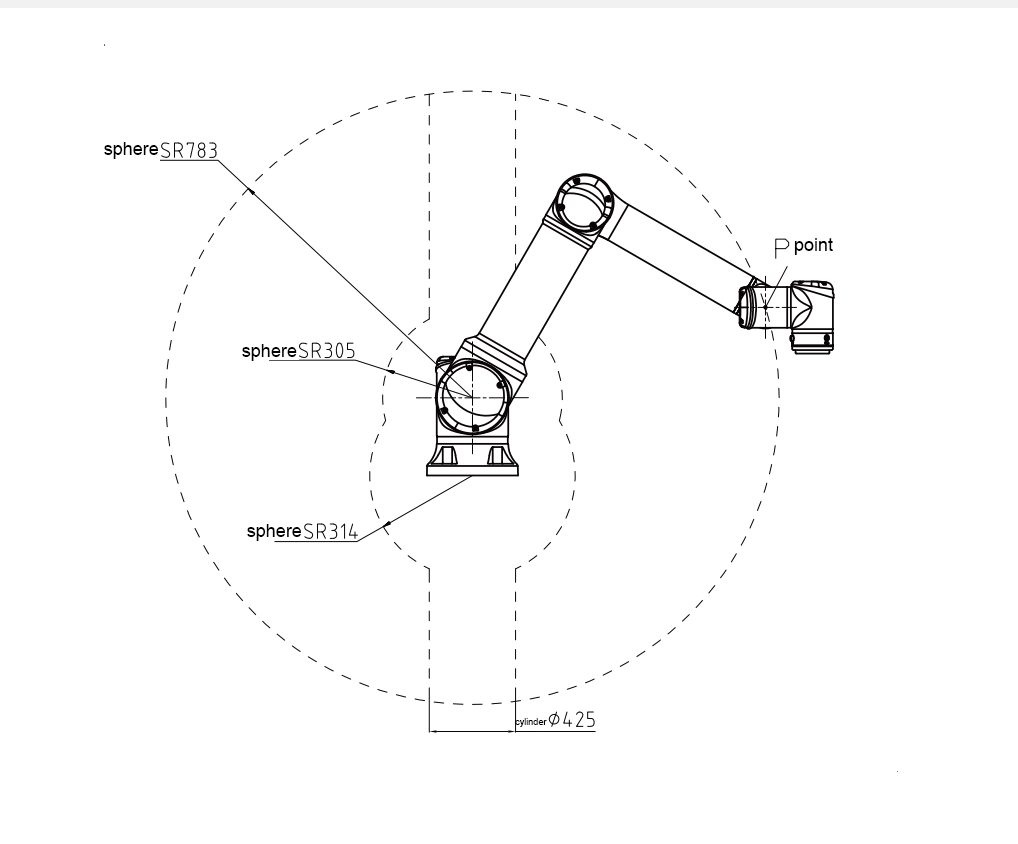
| Envergure des bras | 900mm | |
| Degré de liberté | 6 | |
| Portée de mouvement | Joint 1 | ± 360 ° |
| Joint 2 | ± 360 ° | |
| Joint 3 | ± 165 ° | |
| Joint 4 | ± 360 ° | |
| Joint 5 | ± 360 ° | |
| Joint 6 | ± 360 ° | |
| Vitesse de mouvement | Joint 1 | 150 ° / s |
| Joint 2 | 150 ° / s | |
| Joint 3 | 210 ° / s | |
| Joint 4 | 240 ° / s | |
| Joint 5 | 240 ° / s | |
| Joint 6 | 240 ° / s | |
| Vitesse maximale EOA | 3m / s | |
| Répéter la précision du positionnement (maximum) | ± 0.03mm | |
| Précision de positionnement absolue (maximale) | 0.5mm | |
| Bus de contrôle/fréquence | EtherCAT/1kHz | |
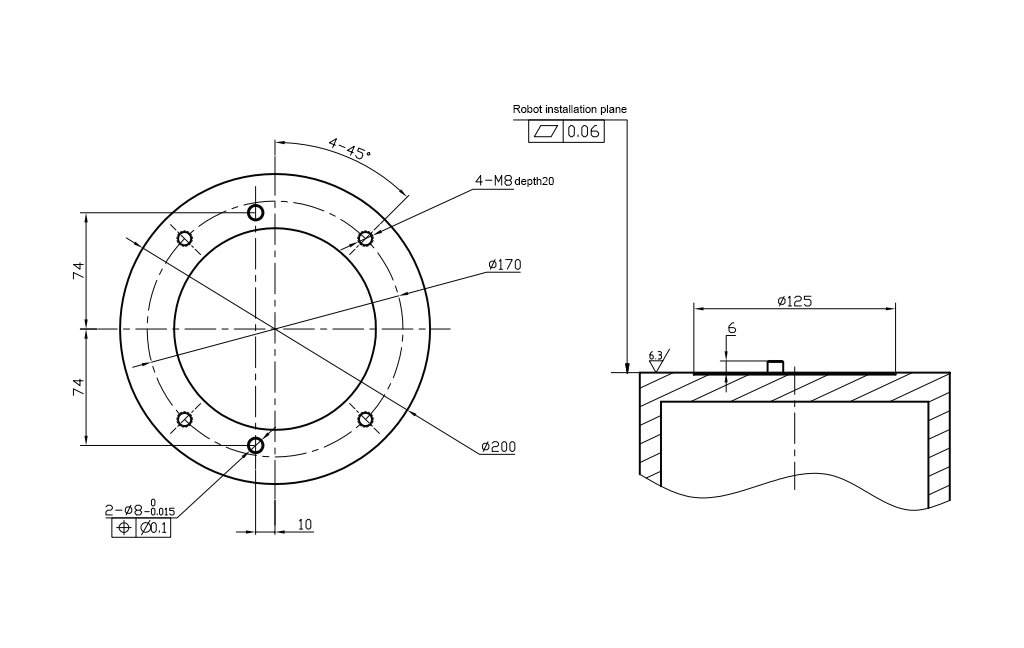
| Méthode d'installation | n'importe quel angle | |
| Puissance typique | 550W | |
| Matières | Alliage d'aluminium | |
| Température ambiante | -5 ° C ~ 55 ° C | |
| Environnement de travail (humidité) | 5 % ~ 90 % HR (sans condensation) | |
| Longueur du câble | 5m | |
| CATÉGORIE IP | IP68 | |
| Bruit | ≤60dB | |
| Port IO de l'extrémité de l'outil | entrée numérique*2, sortie numérique*2, entrée analogique * 2, alimentation de sortie 24V/1A * 1 |
|
| Port de communication de l'extrémité de l'outil | entrée numérique*2, sortie numérique*2, entrée analogique * 2, alimentation de sortie 24V/1A * 1 |
|
| Ex db eb ib mb pxb IIC T6 Gb Ex ib mb xb tb IIIC T85℃ Db |
||