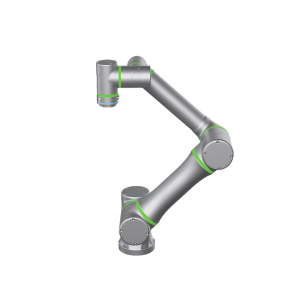
| Modelo | R3-063S | |
| Robô Arm Net Eoito (sem cabos) |
14KG | |
| carga paga | 3KG | |
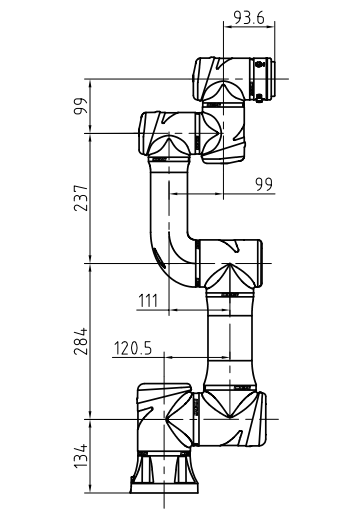
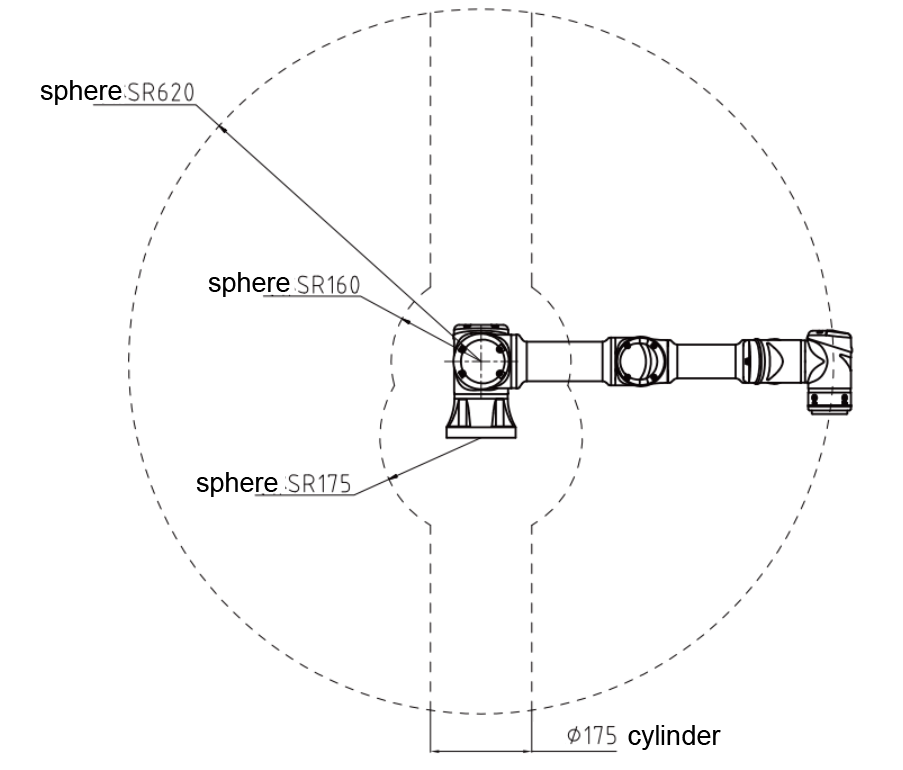
| Envergadura | 620mm | |
| Grau de liberdade | 6 | |
| Movimento Variação |
Junta 1 | ± 360 ° |
| Junta 2 | ± 360 ° | |
| Junta 3 | ± 165 ° | |
| Junta 4 | ± 360 ° | |
| Junta 5 | ± 360 ° | |
| Junta 6 | ± 360 ° | |
| Movimento Velocidade |
Junta 1 | 220 ° / s |
| Junta 2 | 220 ° / s | |
| Junta 3 | 240 ° / s | |
| Junta 4 | 360 ° / s | |
| Junta 5 | 360 ° / s | |
| Junta 6 | 360 ° / s | |
| EOA Velocidade Máxima | 2m / s | |
| Precisão de posicionamento repetido (máximo) | ± 0.02mm | |
| Absoluta Precisão de posicionamento (máximo) | 0.5mm | |
| Controle Barramento/Frequência | EtherCAT/1kHz | |
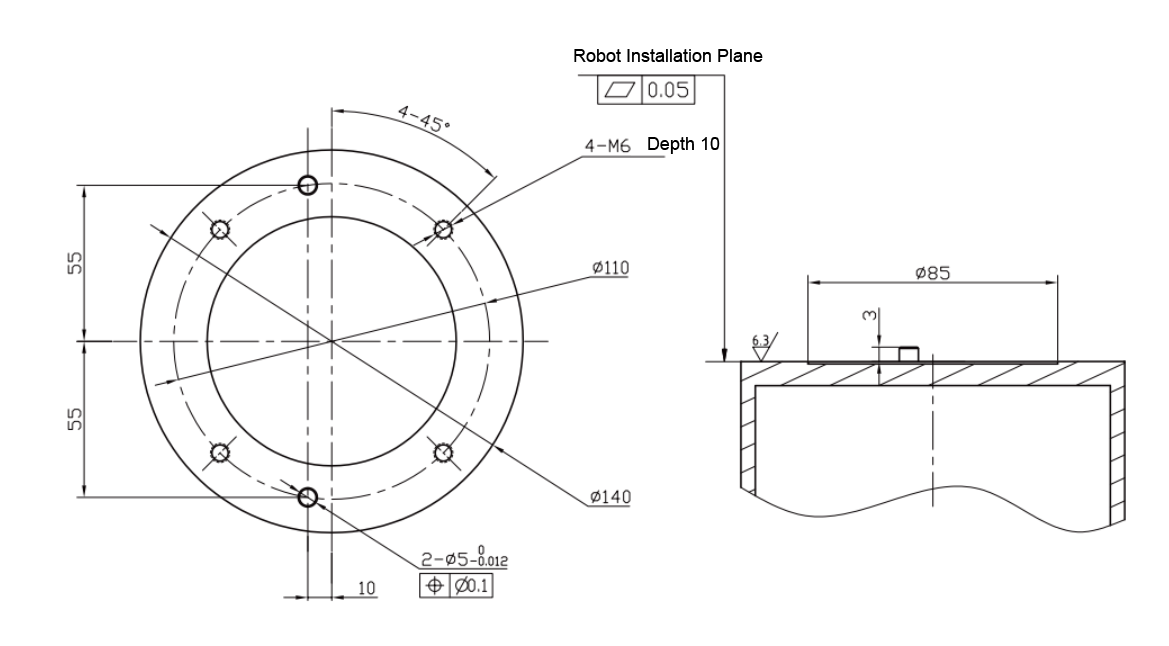
| Método de instalação | qualquer ângulo | |
| Típico Potência | 150W | |
| Material | Liga de alumínio | |
| Temperatura ambiente | -5 ° C ~ 55 ° C | |
| Ambiente de Trabalho (umidade) | 5% ~ 90% UR (sem condensação) |
|
| Comprimento do cabo | 4m | |
| GRAU IP | IP54 | |
| Ruído | ≤60dB | |
| Porta IO final da ferramenta | entrada digital*2, saída digital*2, entrada analógica * 2, fonte de alimentação de saída 24V / 1A * 1 |
|
| Ferramenta Terminar porta de comunicação | EtherCAT*1,RS485*1, fonte de alimentação de saída24V/1A*1 |
|