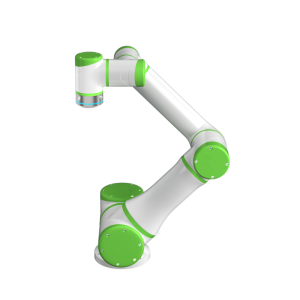
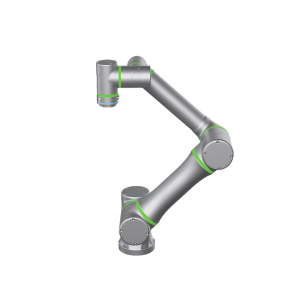
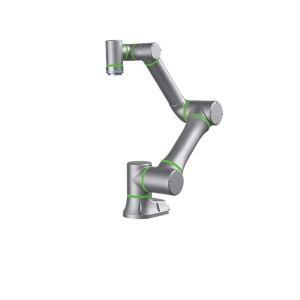
Brațul cobot este folosit în principal pentru manipulare, paletizare, pick and place, de asemenea pentru sudare cu arc, cu fiabilitate ridicată și performanță excelentă.
| Model | XR18-EX-098S (rezistent la explozie) |
|
| Robot Arm Net Eeight (fara cabluri) |
35kg | |
| Încărcătură utilă | 18kg | |
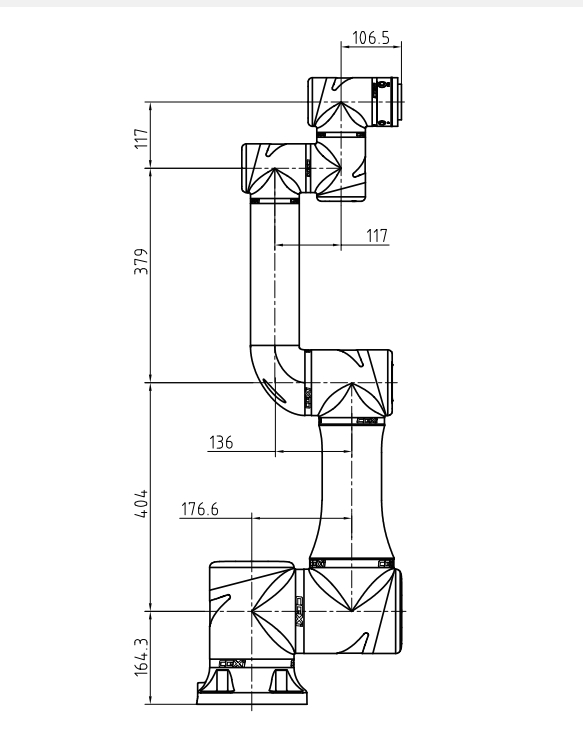
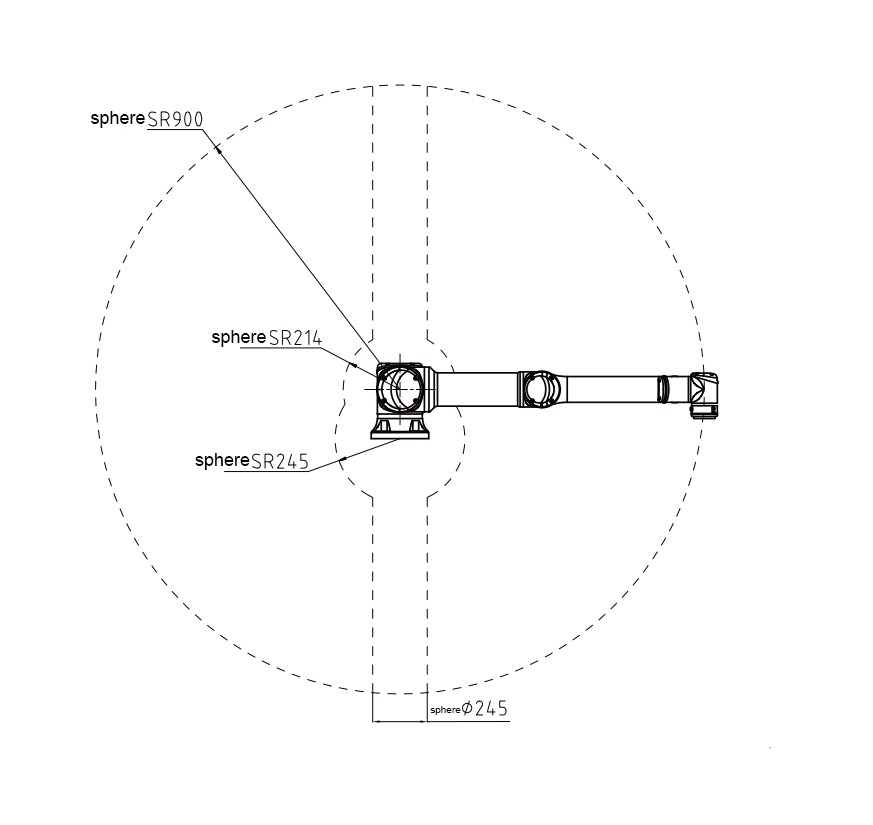
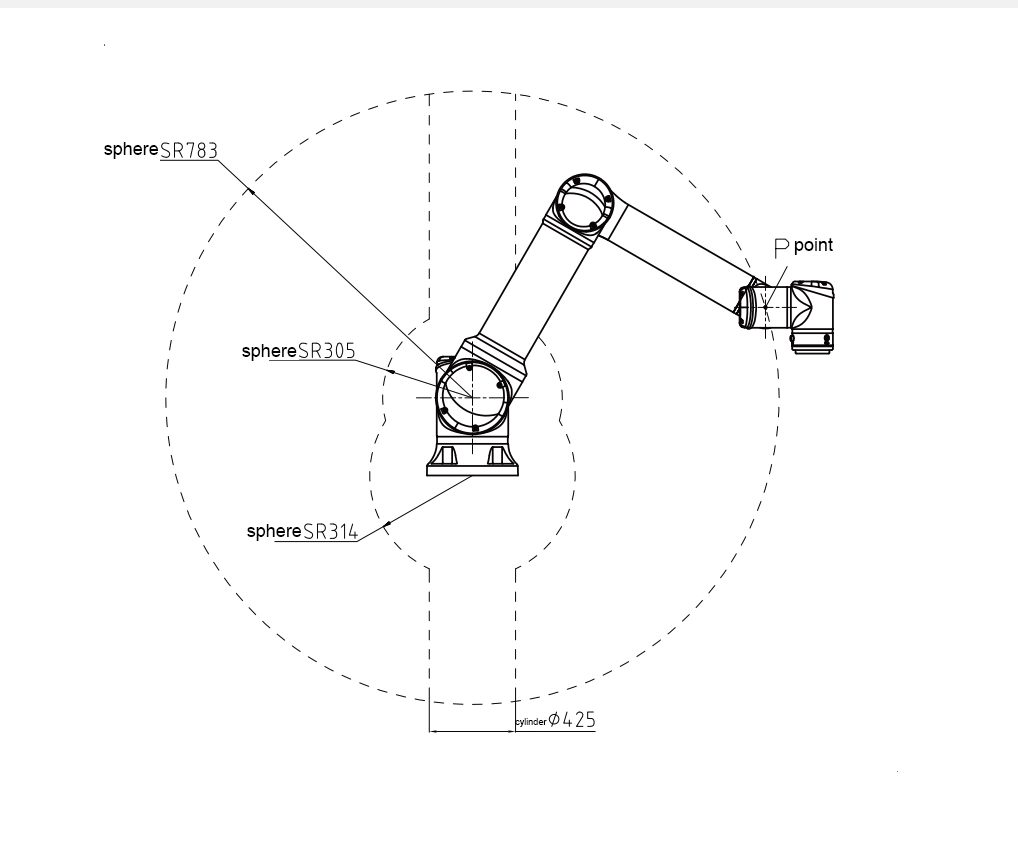
| Întinderea brațelor | 900mm | |
| Grad de libertate | 6 | |
| Interval de mișcare | Articulația 1 | ± 360 ° |
| Articulația 2 | ± 360 ° | |
| Articulația 3 | ± 165 ° | |
| Articulația 4 | ± 360 ° | |
| Articulația 5 | ± 360 ° | |
| Articulația 6 | ± 360 ° | |
| Viteza de mișcare | Articulația 1 | 150 ° / s |
| Articulația 2 | 150 ° / s | |
| Articulația 3 | 210 ° / s | |
| Articulația 4 | 240 ° / s | |
| Articulația 5 | 240 ° / s | |
| Articulația 6 | 240 ° / s | |
| Viteza maximă EOA | 3m / s | |
| Precizie de poziționare repetată (maximum) | ± 0.02mm | |
| Precizie absolută de poziționare (maximum) | 0.5mm | |
| Control Bus/Frecvență | EtherCAT/1kHz | |
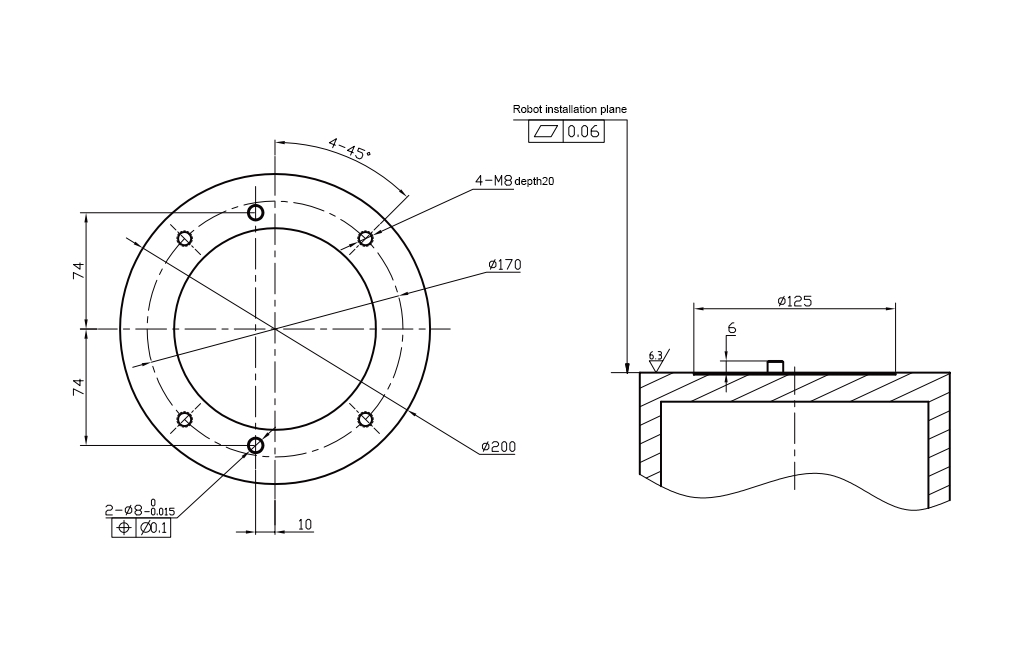
| Metoda de instalare | orice unghi | |
| Puterea tipică | 550W | |
| Material | Aliaj de aluminiu | |
| Temperatura ambianta | -5 ° C ~ 55 ° C | |
| Mediul de lucru (umiditate) | 5%~90%RH (fără condensare) | |
| Lungime cablu | 5m | |
| GRAD IP | IP68 | |
| Zgomot | ≤60dB | |
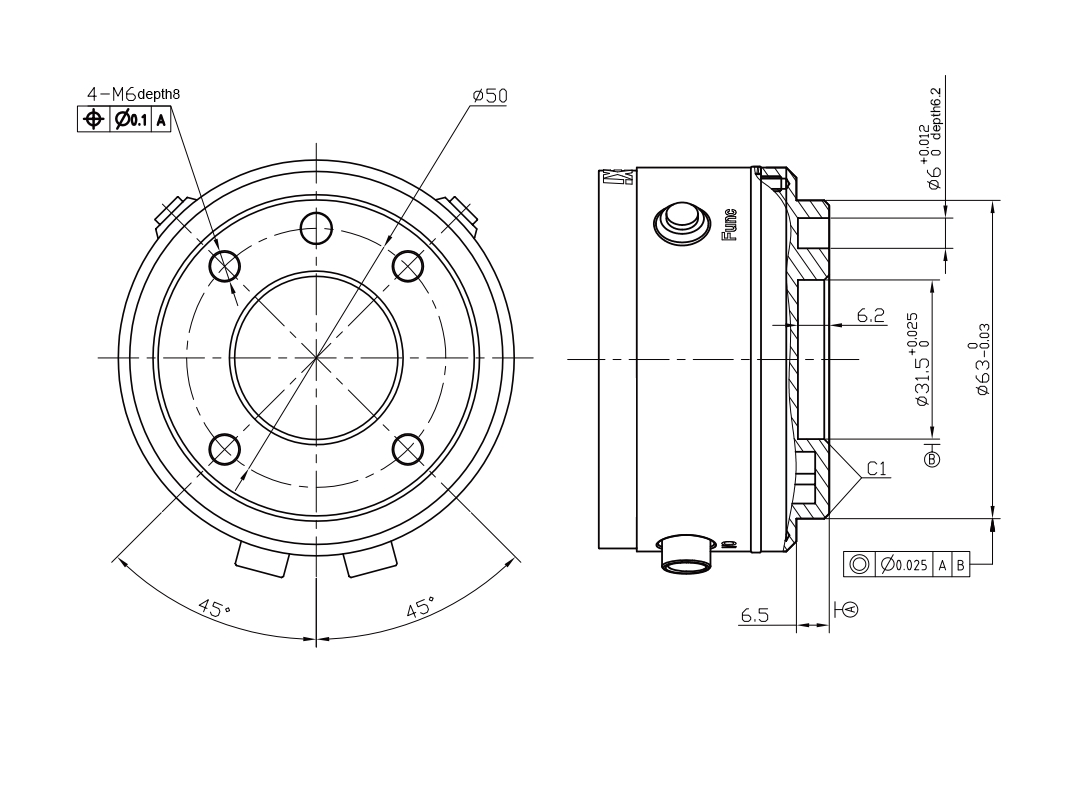
| Port IO de la capătul sculei | intrare digitală*2, ieșire digitală*2, intrare analogică*2, alimentare de ieșire 24V/1A*1 |
|
| Port de comunicare la capătul instrumentului | intrare digitală*2, ieșire digitală*2, intrare analogică*2, alimentare de ieșire 24V/1A*1 |
|
| Ex db eb ib mb pxb IIC T6 Gb Ex ib mb xb tb IIIC T85℃ Db |
||