Као водећи добављач индустријских робота из Кине, поносни смо што представљамо наш најсавременији 6-осни робот, свестрану роботску руку високих перформанси која прави револуцију у производној индустрији. Са својим напредним функцијама, импресивним капацитетом носивости и широким спектром апликација, наш 6-осни робот је дизајниран да задовољи растуће потребе савремених производних процеса. У овом чланку ћемо вам пружити свеобухватан преглед нашег 6-осног робота, укључујући његове техничке детаље, апликације, оперативне процедуре и још много тога.

Наш робот са 6 осовина је пројектован са најсавременијом технологијом и има импресивне спецификације које га издвајају од конкуренције. Ево неколико кључних техничких детаља нашег робота са 6 осовина:
1.Цапацити Цапацити: Наш робот са 6 осовина има високу носивост до 800 кг, што га чини погодним за руковање тешким предметима и обављање захтевних задатака у индустријским окружењима.
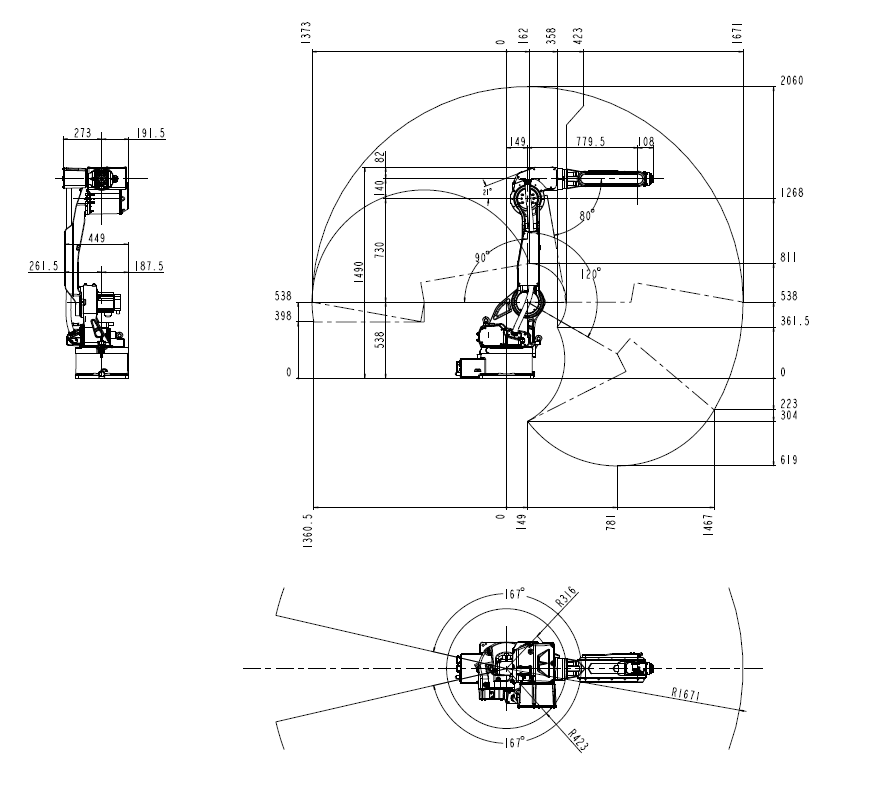
2.достићи: Роботска рука има максимални досег од 3159 мм, омогућавајући јој приступ тешко доступним подручјима и рад у скученим просторима, пружајући изузетну разноврсност у различитим производним окружењима.
3.Прецизност: Наш робот са 6 оса нуди изузетну прецизност са поновљивошћу до +/- 0.02 мм, обезбеђујући прецизне и доследне резултате у задацима који се понављају, што је кључно за одржавање стандарда производње високог квалитета.
4.Убрзати: Роботска рука је способна за брзе и глатке покрете, са максималним брзинама до 2 м/с, омогућавајући ефикасне операције које штеде време у динамичким производним процесима.
Примене нашег 6-осног робота
Наш робот са 6 осовина налази примену у широком спектру индустрија и производних процеса. Неке уобичајене примене нашег робота са 6 осовина укључују.

1.Коришћење материјала: Наш робот са 6 осовина се може користити за утовар, истовар и преношење тешких материјала, компоненти и делова, оптимизујући проток материјала и побољшавајући продуктивност.
2.Монтажа: Роботска рука може да обавља прецизне и понављајуће задатке монтаже, као што су завртање, закивање и лепљење, обезбеђујући доследан квалитет и смањујући људске грешке.
3.Заваривање: Наш 6-осни робот је опремљен напредним могућностима заваривања, што га чини погодним за задатке заваривања у аутомобилској, ваздухопловној и другим металопрерађивачким индустријама, испоручујући прецизне и висококвалитетне заваре.
4.паковање: Роботска рука може ефикасно да се носи са задацима паковања, укључујући бирање, постављање и паковање производа, смањујући трошкове рада и побољшавајући ефикасност паковања.
| модел | КЈР10-1 | |
| Број осовине | 6 | |
| Користан терет | КСНУМКСкг | |
| Поновите позиционирање | &плусмн;0.05 мм | |
| Мак Армспан | КСНУМКСмм | |
| Мотион Ранге | J1 | &плусмн;172&ордм; |
| J2 | ﹢166&ордм;,﹣107&ордм; | |
| J3 | ﹢83&ордм;,﹣92&ордм; | |
| J4 | &плусмн;170&ордм; | |
| J5 | &плусмн;125&ордм; | |
| J6 | &плусмн;360&ордм; | |
| Максимална брзина | J1 | 172&ордм;/с |
| J2 | 172&ордм;/с | |
| J3 | 183&ордм;/с | |
| J4 | 430&ордм;/с | |
| J5 | 430&ордм;/с | |
| J6 | 584&ордм;/с | |
| Дозвољени обртни момент | J4 | КСНУМКСН.м |
| J5 | КСНУМКСН.м | |
| J6 | КСНУМКСН.м | |
| Момент инерције | J4 | 0.63 кг.м&суп2; |
| J5 | 0.63 кг.м&суп2; | |
| J6 | 0.1 кг.м&суп2; | |
| Телесна тежина робота | КСНУМКСкг | |
| Капацитет напајања | 3.3кВА | |
| Кабинет Величина | КСНУМКС * КСНУМКС * КСНУМКСмм | |
| Кабинет Тежина | КСНУМКСкг | |
| извор | Трофазни четворожични | |
| Инсталирање обрасца | Земља, плафон | |