| модел | Р12-135С | |
| Робот Арм Нет Ееигхт (без каблова) |
КСНУМКСКГ | |
| Користан терет | КСНУМКСКГ | |
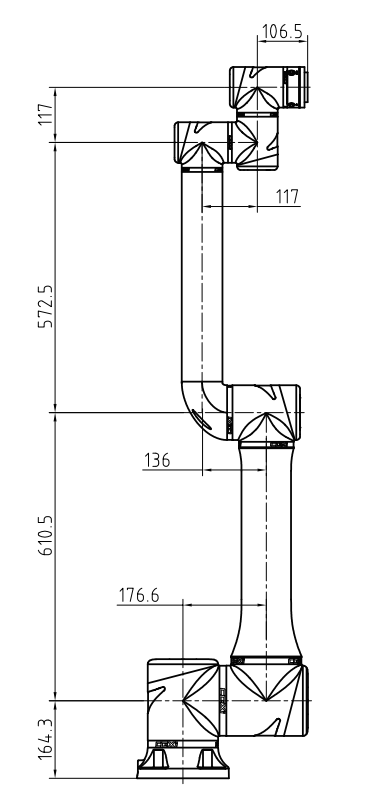
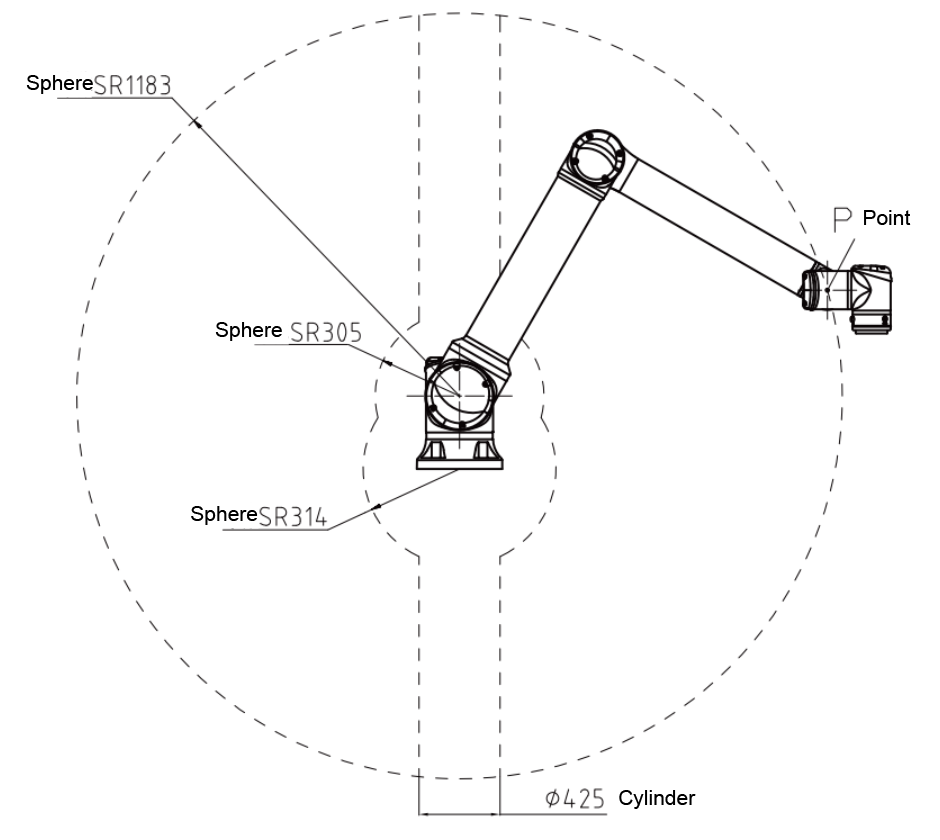
| Армспан | КСНУМКСмм | |
| Степен слободе | 6 | |
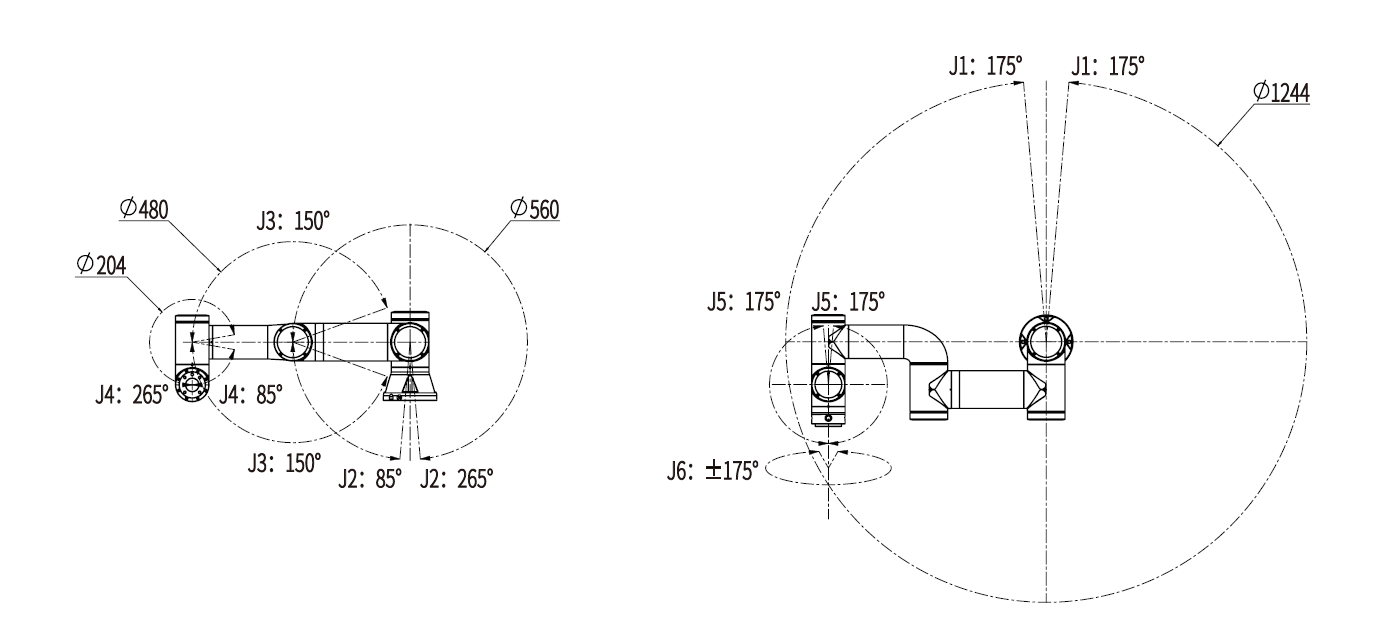
| Кретање Домет |
Зглоб 1 | ± КСНУМКС ° |
| Јоинт 2 | ± КСНУМКС ° | |
| Јоинт 3 | ± КСНУМКС ° | |
| Јоинт 4 | ± КСНУМКС ° | |
| Јоинт 5 | ± КСНУМКС ° | |
| Јоинт 6 | ± КСНУМКС ° | |
| Кретање Убрзати |
Зглоб 1 | КСНУМКС ° / с |
| Јоинт 2 | КСНУМКС ° / с | |
| Јоинт 3 | КСНУМКС ° / с | |
| Јоинт 4 | КСНУМКС ° / с | |
| Јоинт 5 | КСНУМКС ° / с | |
| Јоинт 6 | КСНУМКС ° / с | |
| ЕОА Максимална брзина | КСНУМКСм / с | |
| Поновите тачност позиционирања (максимално) | ± КСНУМКСмм | |
| Апсолутна тачност позиционирања (максимална) | КСНУМКСмм | |
| Контрола Сабирница/фреквенција | ЕтхерЦАТ/1кХз | |
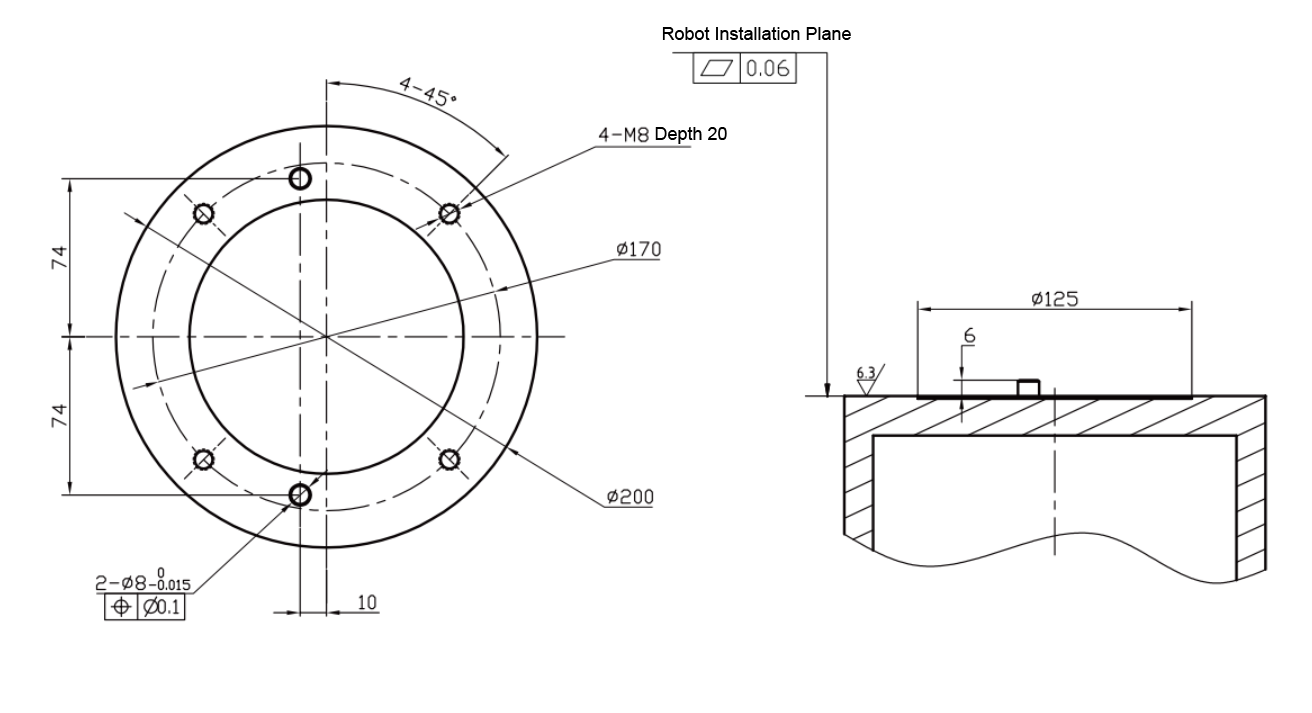
| Инсталација Метод | било који угао | |
| Типична снага | КСНУМКСВ | |
| Материјал | Легура алуминијума | |
| Температура околине | -КСНУМКС ° Ц ~ КСНУМКС ° Ц | |
| Радно окружење (влажност) | 5%, 90% РХ (без кондензације) |
|
| Дужина кабла | 6m | |
| ИП ГРАДЕ | ИПКСНУМКС | |
| Бука | ≤КСНУМКСдБ | |
| ИО порт за крај алата | дигитални улаз*2, дигитални излаз*2, аналогни улаз*2, излазно напајање 24В/1А*1 |
|
| Алат Заврши комуникациони порт | ЕтхерЦАТ*1, РС485*1, излазно напајање 24В/1А*1 |
|