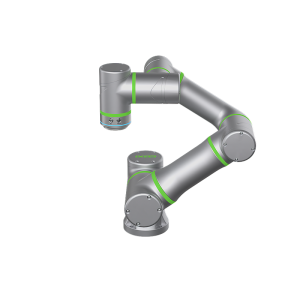
| Model | Р12-135С | |
| Робот Arm Net Eeight (без кабелів) |
36KG | |
| корисне навантаження | 12KG | |
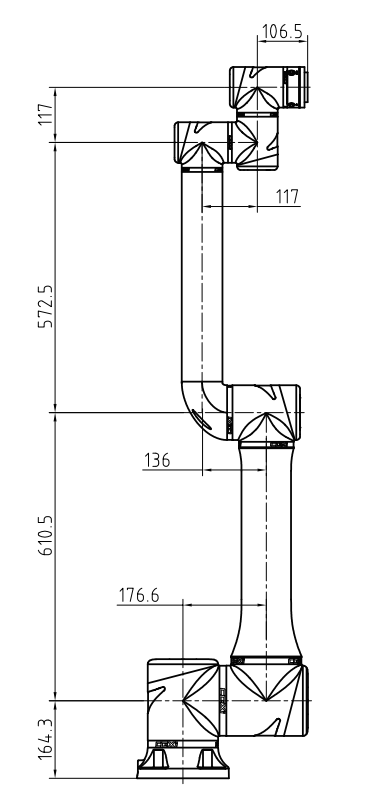
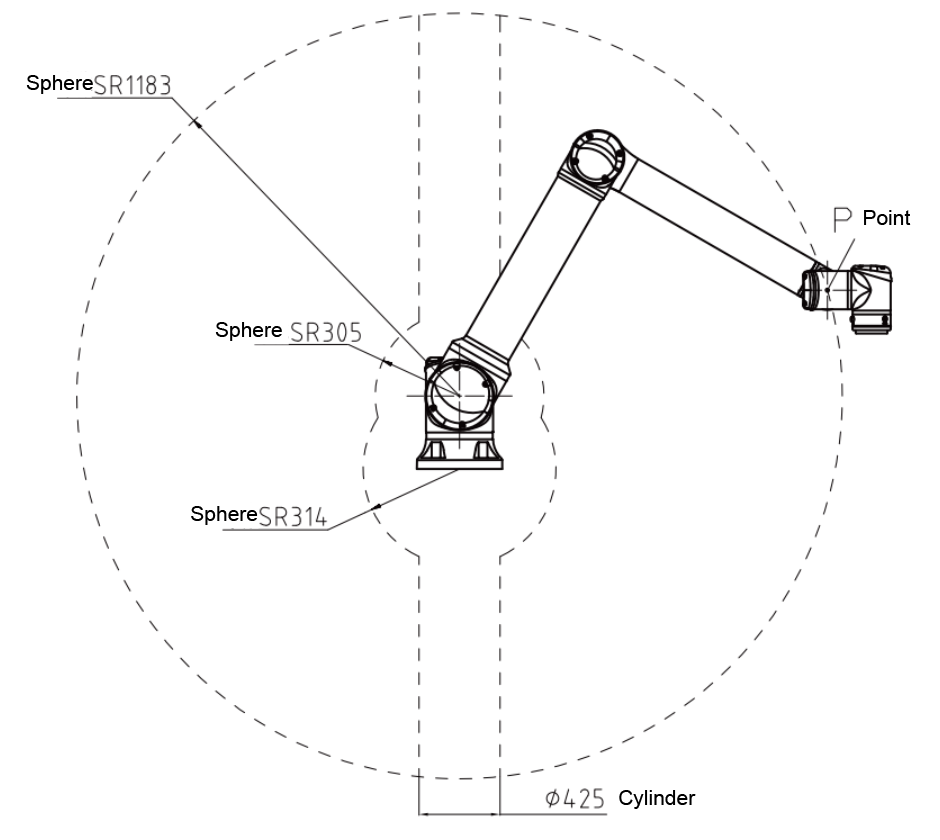
| Розмах рук | 1300mm | |
| Ступінь свободи | 6 | |
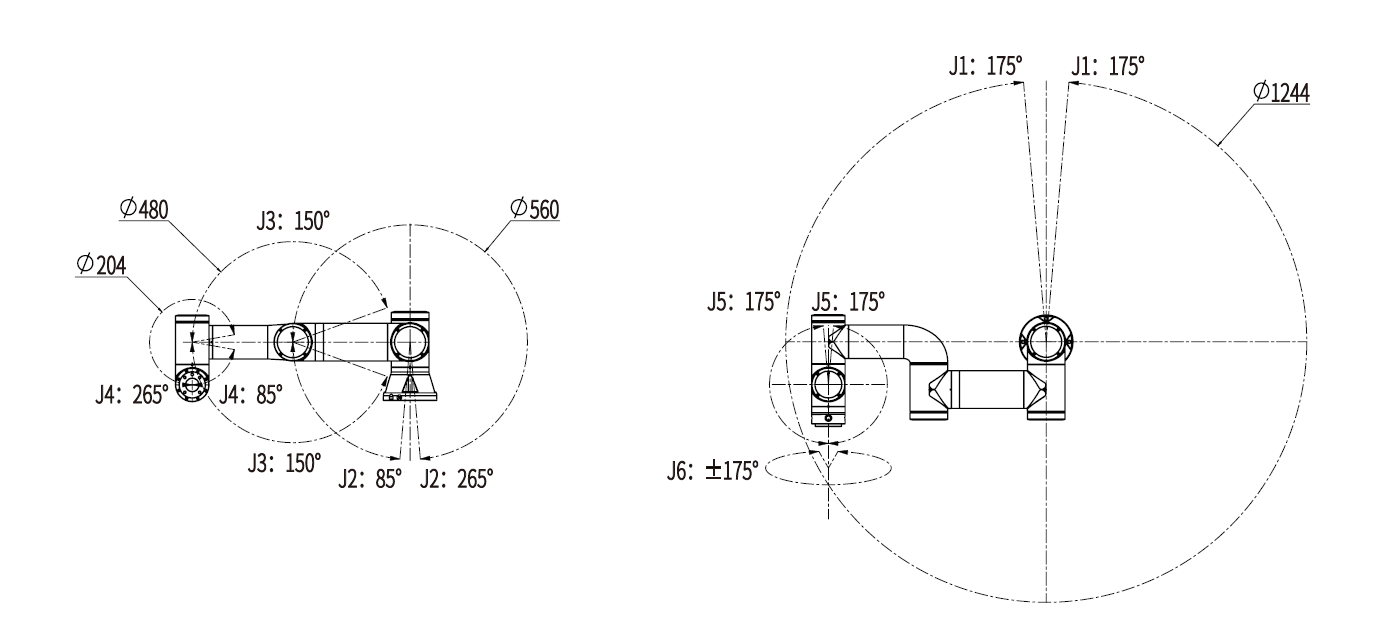
| Рух Діапазон |
Суглоб 1 | ± 360 ° |
| Суглоб 2 | ± 360 ° | |
| Суглоб 3 | ± 165 ° | |
| Суглоб 4 | ± 360 ° | |
| Суглоб 5 | ± 360 ° | |
| Суглоб 6 | ± 360 ° | |
| Рух швидкість |
Суглоб 1 | 150 ° / с |
| Суглоб 2 | 150 ° / с | |
| Суглоб 3 | 210 ° / с | |
| Суглоб 4 | 240 ° / с | |
| Суглоб 5 | 240 ° / с | |
| Суглоб 6 | 240 ° / с | |
| EOA Максимальна швидкість | 3m / с | |
| Повторна точність позиціонування (максимальна) | ± 0.03мм | |
| Абсолютна точність позиціонування (максимальна) | 0.5mm | |
| Контроль Шина/Частота | EtherCAT/1 кГц | |
| Спосіб встановлення | будь-який кут | |
| Типова потужність | 550W | |
| Матеріал | Алюмінієвий сплав | |
| Температура навколишнього середовища | -5 ° C ~ 55 ° C | |
| Робоче середовище (вологість) | 5% ~ 90% RH (без конденсації) |
|
| Довжина кабелю | 6m | |
| IP ОРГАН | IP65 | |
| шум | ≤60dB | |
| Порт введення-виведення інструменту | цифровий вхід*2,цифровий вихід*2, аналоговий вхід*2, вихідне живлення 24В/1А*1 |
|
| Інструмент Кінцевий комунікаційний порт | EtherCAT*1,RS485*1, вихідне живлення 24В/1А*1 |
|