The overall system architecture of the robot is compact, lightweight, large workspace, fast response, high repeat positioning accuracy, applicable to assembly, sorting, handling, loading and unloading applications, etc.
| Model | QJR6S-1 | |
| Axis Number | 6 | |
| Payload | 6kg | |
| Repeat Positioning | ±0.02mm | |
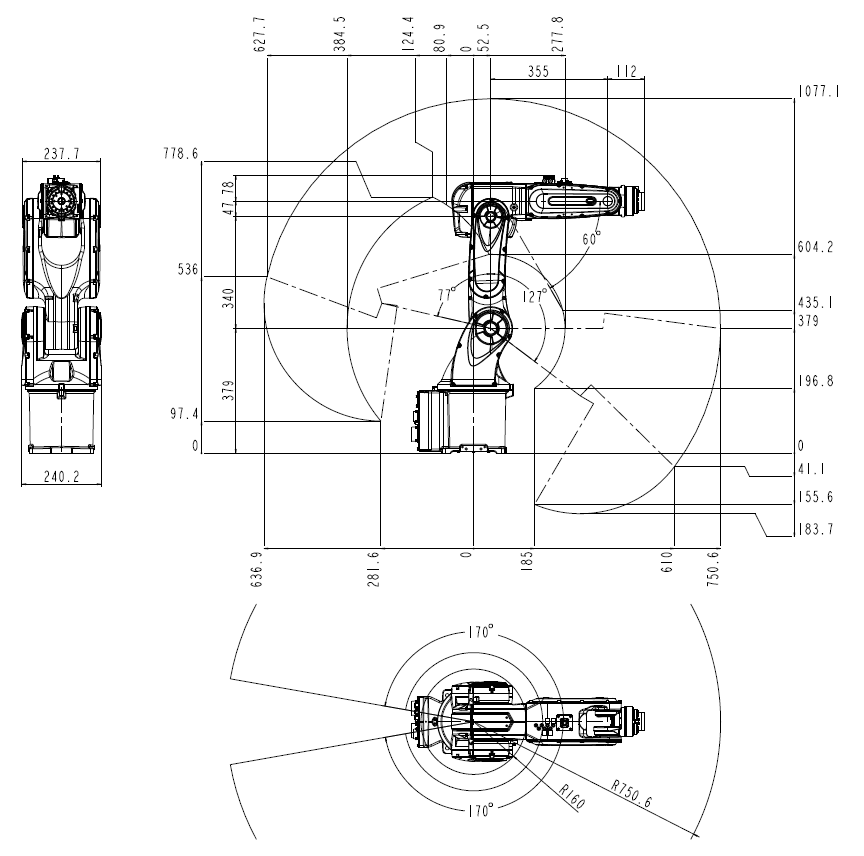
| Max Armspan | 750.6mm | |
| Motion Range | J1 | ±172º |
| J2 | ﹢132º,﹣82º | |
| J3 | ﹢65º,﹣190º | |
| J4 | ±172º | |
| J5 | ±120º | |
| J6 | ±360º | |
| Max Speed | J1 | 367º/s |
| J2 | 321º/s | |
| J3 | 367º/s | |
| J4 | 372º/s | |
| J5 | 476º/s | |
| J6 | 705º/s | |
| Allowable Torque | J4 | 8.73N.m |
| J5 | 8.73N.m | |
| J6 | 4.41N.m | |
| Inertia Moment | J4 | 0.47kg.m² |
| J5 | 0.47kg.m² | |
| J6 | 0.06kg.m² | |
| Robot Body Weight | 39kg | |
| Power Capacity | 1.5kVA | |
| Cabinet Size | 375*421*211mm | |
| Cabinet Weight | 15kg | |
| Source | Single-phase | |
| Installing Form | Ground, Ceiling | |