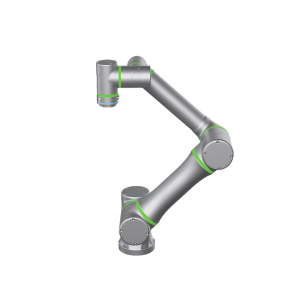
يتم استخدام ذراع الروبوت بشكل أساسي في المناولة، والتحزيم، والالتقاط والوضع، وكذلك اللحام القوسي، مع موثوقية عالية وأداء ممتاز.
| الموديل | XR18-EX-138S (حدث الانفجار) |
|
| شبكة ذراع الروبوت ثمانية (بدون كابلات) |
35kg | |
| الحمولة | 18kg | |
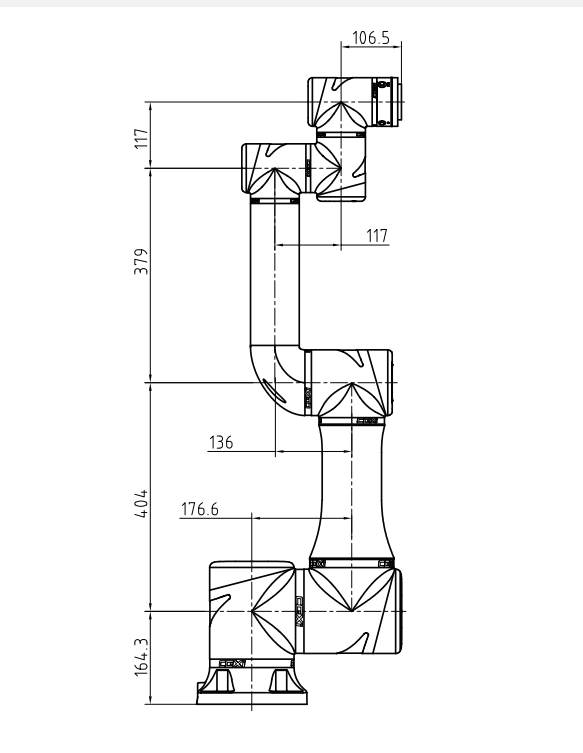
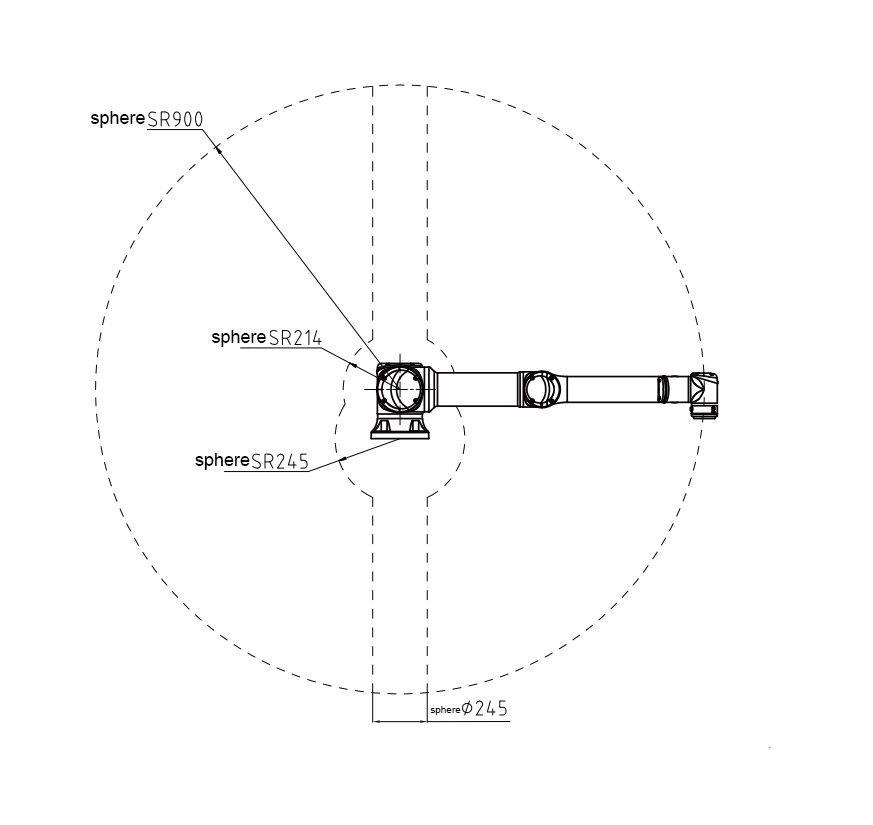
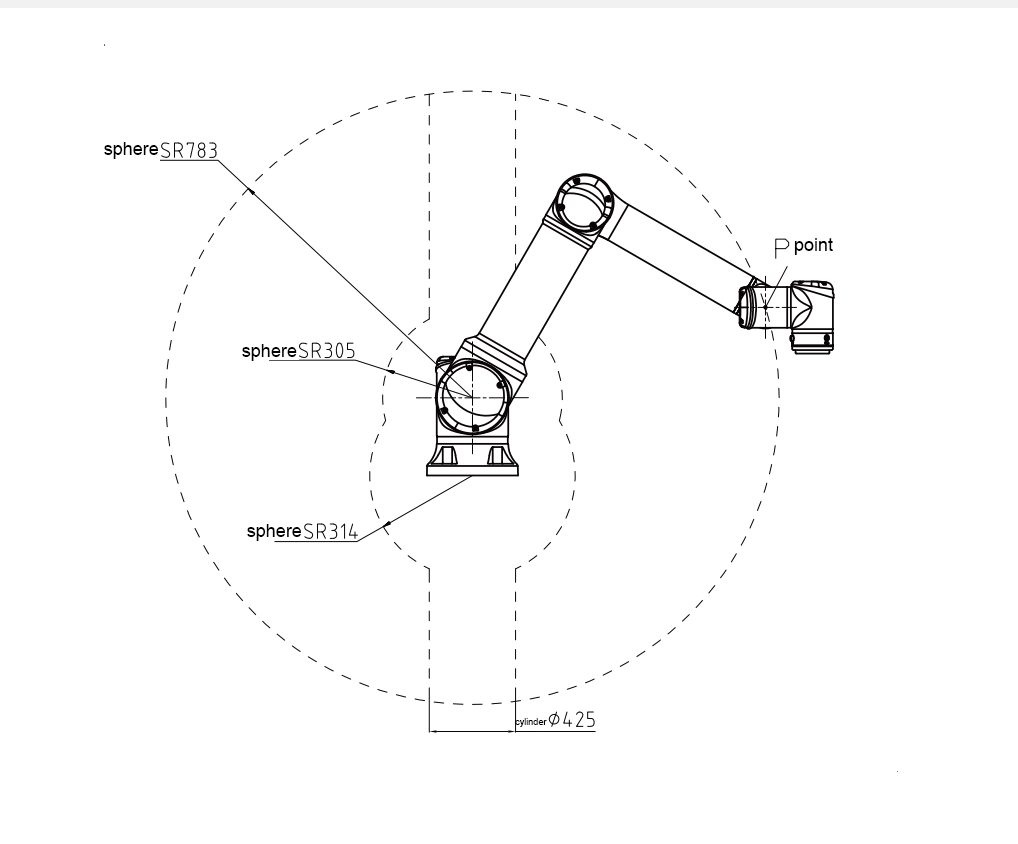
| ذراع تمتد | 900mm | |
| درجة من الحرية | 6 | |
| نطاق الحركة | المشترك 1 | ± 360 ° |
| المشترك 2 | ± 360 ° | |
| المشترك 3 | ± 165 ° | |
| المشترك 4 | ± 360 ° | |
| المشترك 5 | ± 360 ° | |
| المشترك 6 | ± 360 ° | |
| سرعة الحركة | المشترك 1 | 150 ° / ثانية |
| المشترك 2 | 150 ° / ثانية | |
| المشترك 3 | 210 ° / ثانية | |
| المشترك 4 | 240 ° / ثانية | |
| المشترك 5 | 240 ° / ثانية | |
| المشترك 6 | 240 ° / ثانية | |
| السرعة القصوى لـ EOA | 3m / ث | |
| تكرار دقة تحديد المواقع (الحد الأقصى) | ± 0.03mm | |
| الدقة المطلقة لتحديد المواقع (الحد الأقصى) | 0.5mm | |
| التحكم بالحافلة/التردد | إيثركات/1 كيلو هرتز | |
| طريقة التثبيت | أي زاوية | |
| القوة النموذجية | 550W | |
| الخامة | سبائك الألومنيوم | |
| درجة الحرارة المحيطة | -5 ° C ~ 55 ° C | |
| بيئة العمل (الرطوبة) | 5% ~ 90% رطوبة نسبية (بدون تكثيف) | |
| طول الكابل | 5m | |
| درجة الملكية الفكرية | IP68 | |
| ضجيج | ≤60dB | |
| منفذ IO لنهاية الأداة | الإدخال الرقمي*2، الإخراج الرقمي*2، الإدخال التناظري * 2، مصدر طاقة الإخراج 24 فولت/1 أمبير * 1 |
|
| منفذ اتصال نهاية الأداة | الإدخال الرقمي*2، الإخراج الرقمي*2، الإدخال التناظري * 2، مصدر طاقة الإخراج 24 فولت/1 أمبير * 1 |
|
| Ex db eb ib mb pxb IIC T6 Gb Ex ib mb xb tb IIIC T85°Db |
||