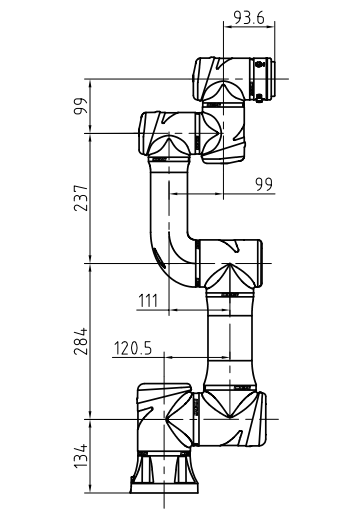
| الموديل | R3-063S | |
| روبوت آرم نت إيت (بدون كابلات) |
14كغم | |
| الحمولة | 3كغم | |
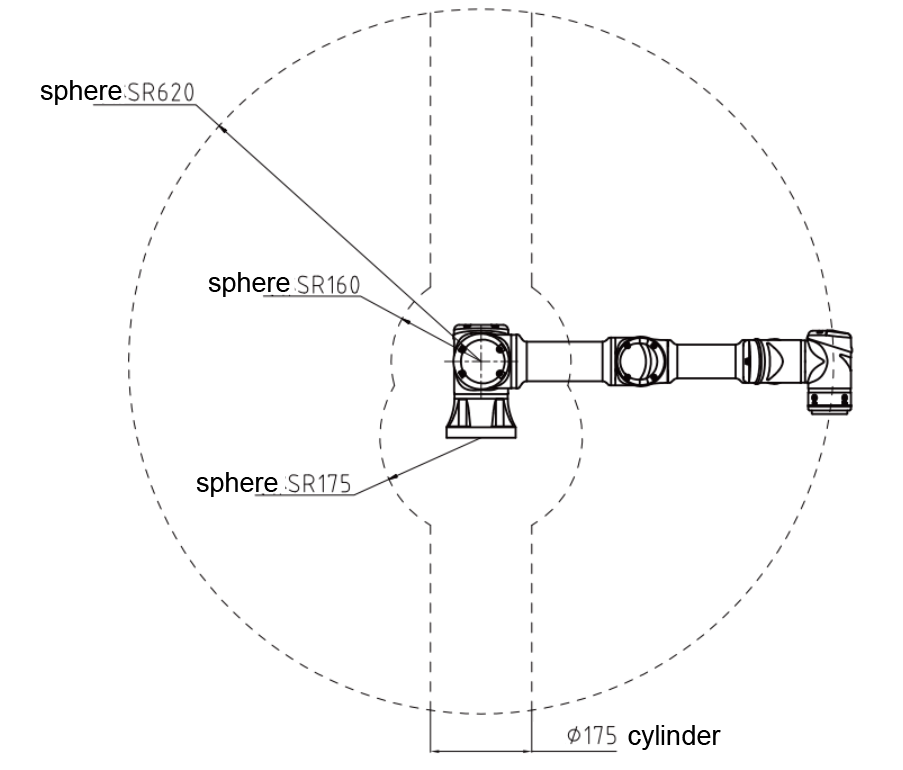
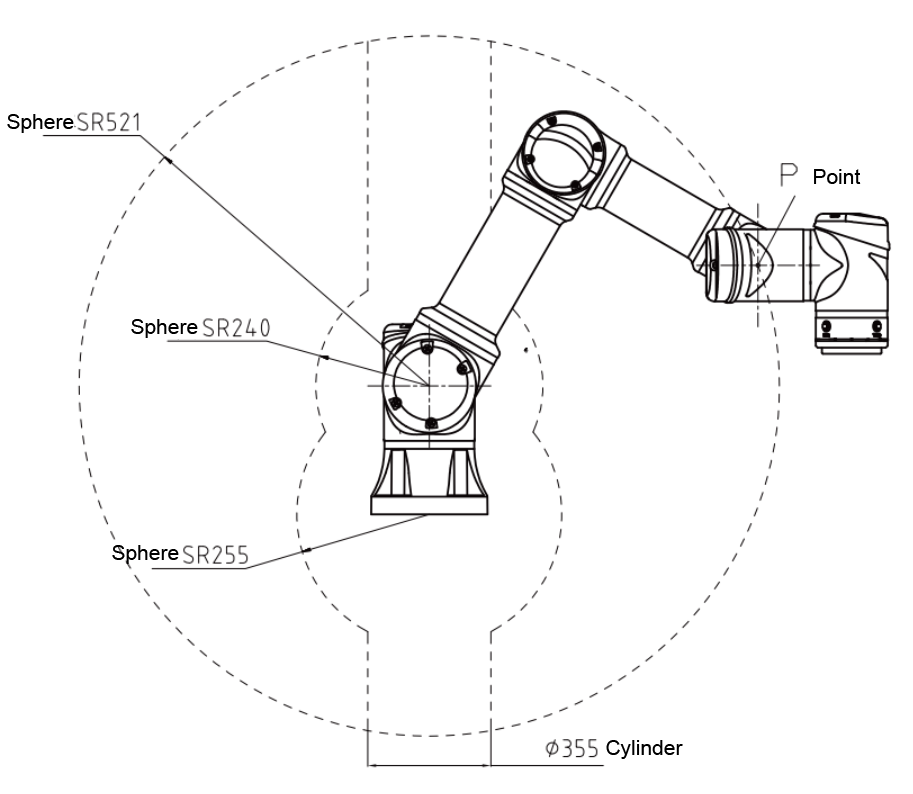
| ذراع تمتد | 620mm | |
| درجة من الحرية | 6 | |
| حركة الفترة (من ... إلى) |
مشترك 1 | ± 360 ° |
| المشترك 2 | ± 360 ° | |
| المشترك 3 | ± 165 ° | |
| المشترك 4 | ± 360 ° | |
| المشترك 5 | ± 360 ° | |
| المشترك 6 | ± 360 ° | |
| حركة سرعة |
مشترك 1 | 220 ° / ثانية |
| المشترك 2 | 220 ° / ثانية | |
| المشترك 3 | 240 ° / ثانية | |
| المشترك 4 | 360 ° / ثانية | |
| المشترك 5 | 360 ° / ثانية | |
| المشترك 6 | 360 ° / ثانية | |
| EOA السرعة القصوى | 2m / ث | |
| تكرار دقة تحديد المواقع (الحد الأقصى) | ± 0.02mm | |
| الدقة المطلقة لتحديد المواقع (الحد الأقصى) | 0.5mm | |
| التحكم الناقل/التردد | إيثركات/1 كيلو هرتز | |
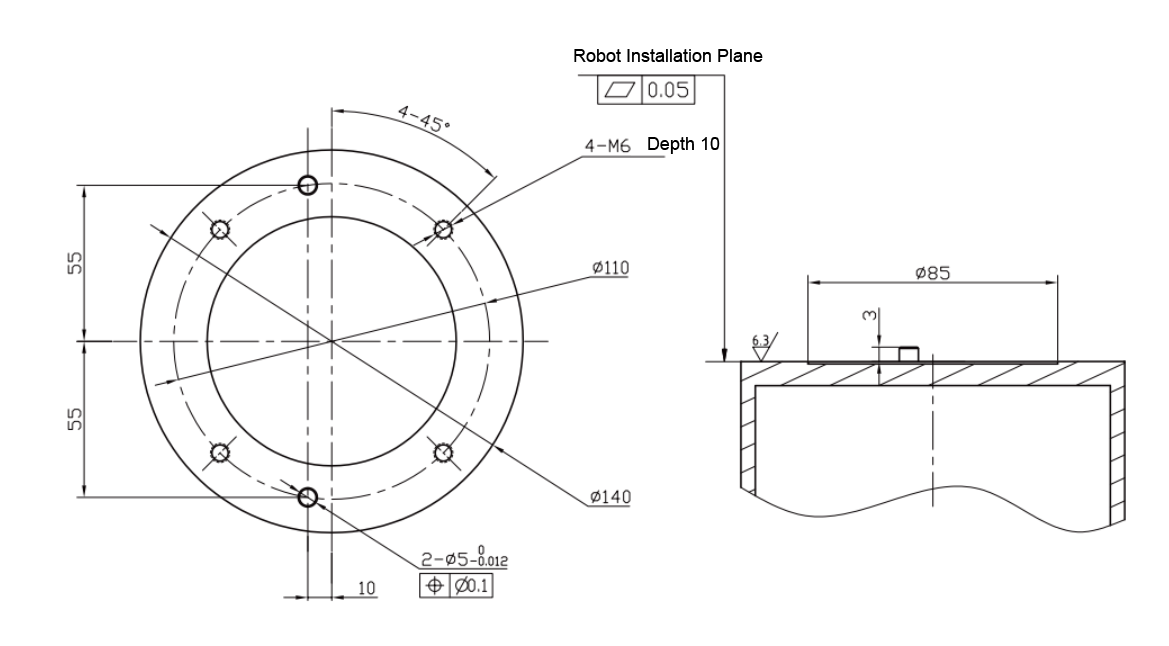
| طريقة التثبيت | أي زاوية | |
| قوة نموذجية | 150W | |
| الخامة | سبائك الألومنيوم | |
| درجة الحرارة المحيطة | -5 ° C ~ 55 ° C | |
| بيئة العمل (الرطوبة) | 5٪ ~ 90٪ RH (لا يوجد تكثيف) |
|
| طول السلك | 4m | |
| درجة IP | IP54 | |
| ضجيج | ≤60dB | |
| منفذ IO لنهاية الأداة | الإدخال الرقمي *2، الإخراج الرقمي*2، الإدخال التناظري * 2، مصدر طاقة الإخراج 24 فولت/1 أمبير * 1 |
|
| الأداة إنهاء منفذ الاتصال | إيثركات * 1، RS485 * 1، مصدر طاقة الإخراج: 24 فولت/1 أمبير*1 |
|