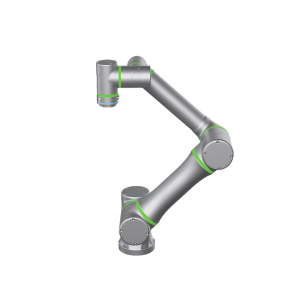
Il braccio del cobot viene utilizzato principalmente per la movimentazione, la pallettizzazione, il pick and place e anche la saldatura ad arco, con elevata affidabilità e prestazioni eccellenti.
| Modello | XR18-EX-098S (a prova di esplosione) |
|
| Braccio robotico Net Otto (senza cavi) |
35 kg | |
| Carico utile | 18 kg | |
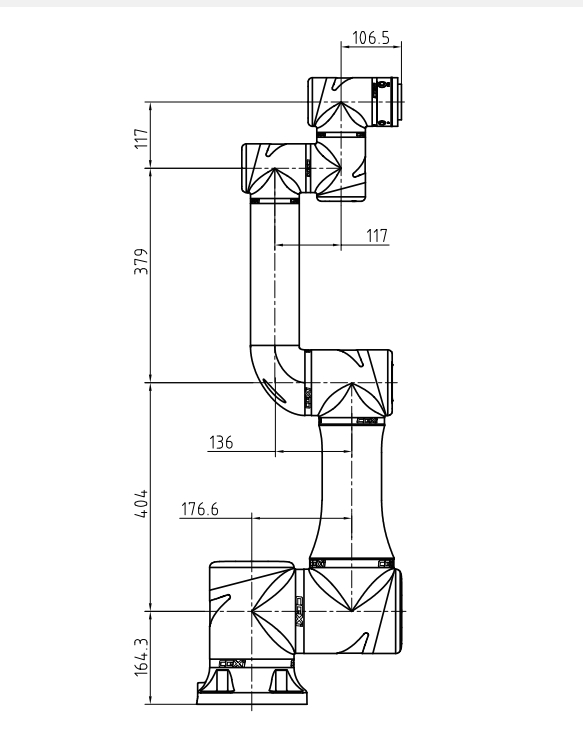
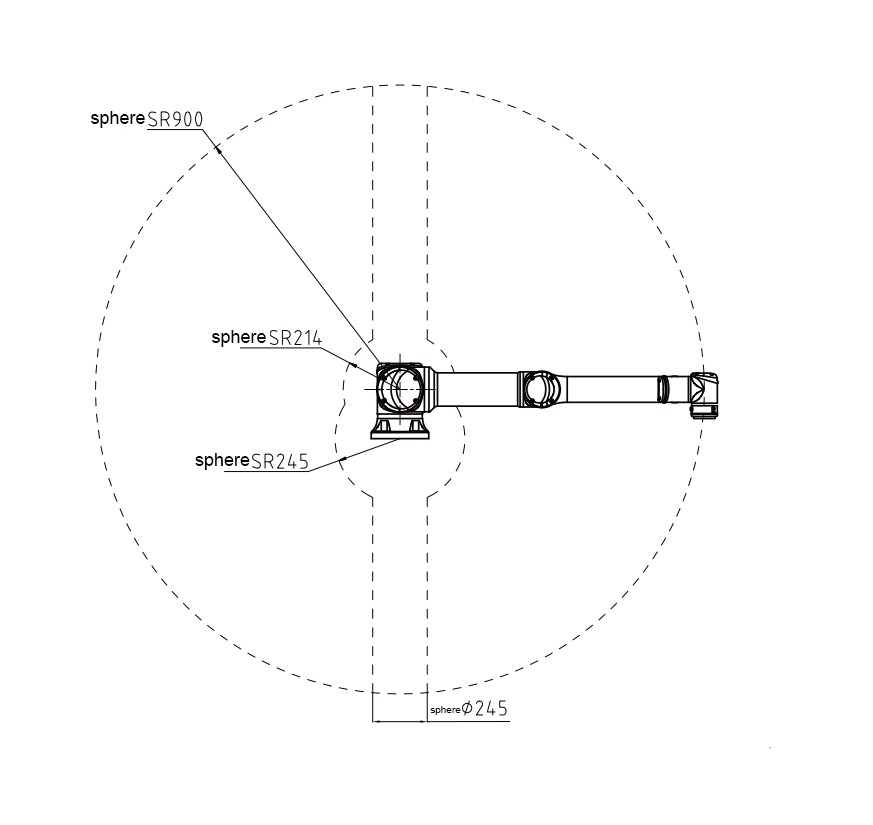
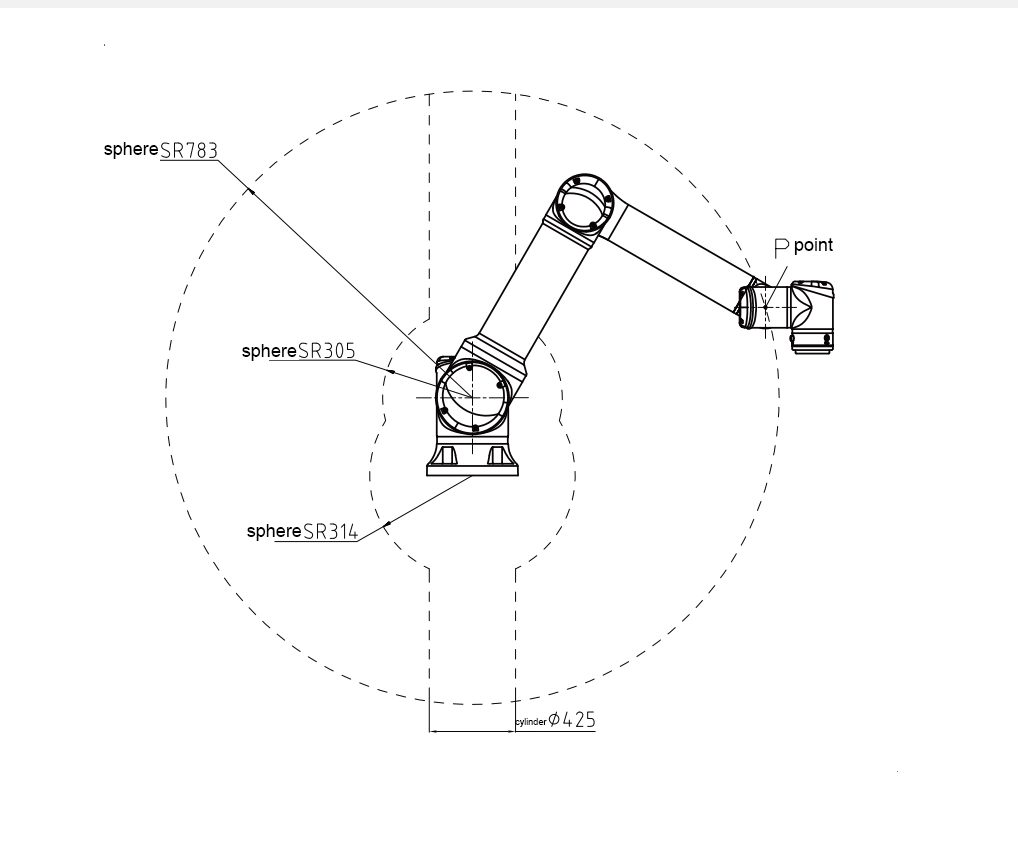
| Apertura delle braccia | 900mm | |
| Grado di libertà | 6 | |
| Intervallo di movimento | Giunto 1 | ± 360 ° |
| Giunto 2 | ± 360 ° | |
| Giunto 3 | ± 165 ° | |
| Giunto 4 | ± 360 ° | |
| Giunto 5 | ± 360 ° | |
| Giunto 6 | ± 360 ° | |
| Movimento Velocità | Giunto 1 | 150 ° / s |
| Giunto 2 | 150 ° / s | |
| Giunto 3 | 210 ° / s | |
| Giunto 4 | 240 ° / s | |
| Giunto 5 | 240 ° / s | |
| Giunto 6 | 240 ° / s | |
| Velocità massima EOA | 3m / s | |
| Ripetizione della precisione di posizionamento (massima) | ± 0.02mm | |
| Precisione di posizionamento assoluta (massima) | 0.5mm | |
| Controllo bus/frequenza | EtherCAT/1kHz | |
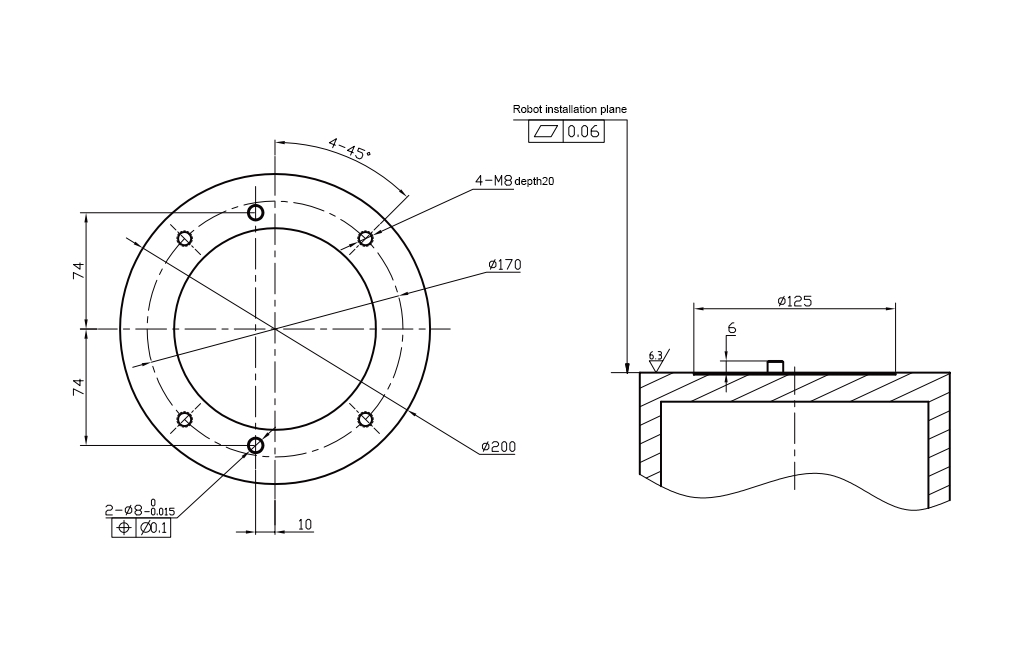
| Metodo di installazione | qualsiasi angolo | |
| Potenza tipica | 550W | |
| Materiali | Lega di alluminio | |
| Temperatura ambiente | -5 ° C ~ 55 ° C | |
| Ambiente di lavoro (umidità) | 5%~90%RH(senza condensa) | |
| Lunghezza del cavo | 5m | |
| GRADO IP | IP68 | |
| Rumore | ≤60dB | |
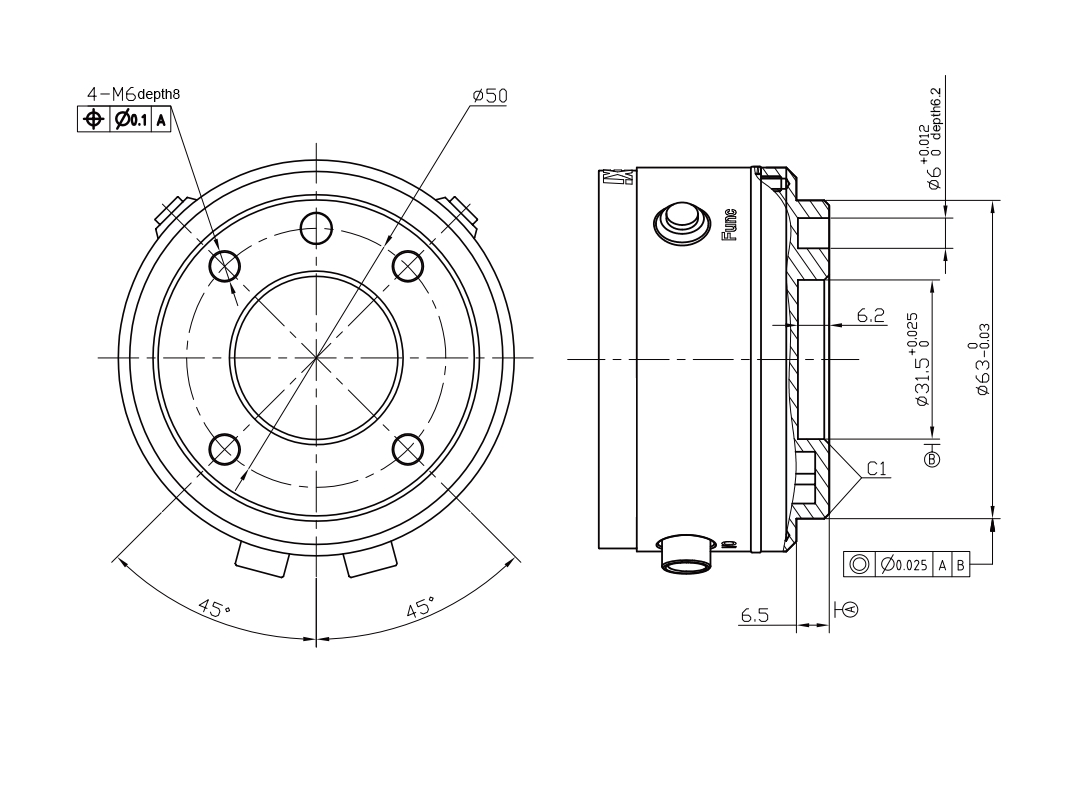
| Porta IO estremità utensile | ingresso digitale*2, uscita digitale*2, ingresso analogico*2, alimentazione in uscita24V/1A*1 |
|
| Porta di comunicazione estremità utensile | ingresso digitale*2, uscita digitale*2, ingresso analogico*2, alimentazione in uscita24V/1A*1 |
|
| Ex db eb ib mb pxb IIC T6 Gb Ex ib mb xb tb IIIC T85℃ Db |
||