| モデル | QJR10-1 | |
| 軸番号 | 6 | |
| ペイロード | 10kg | |
| 繰り返し位置決め | ±0.05mm | |
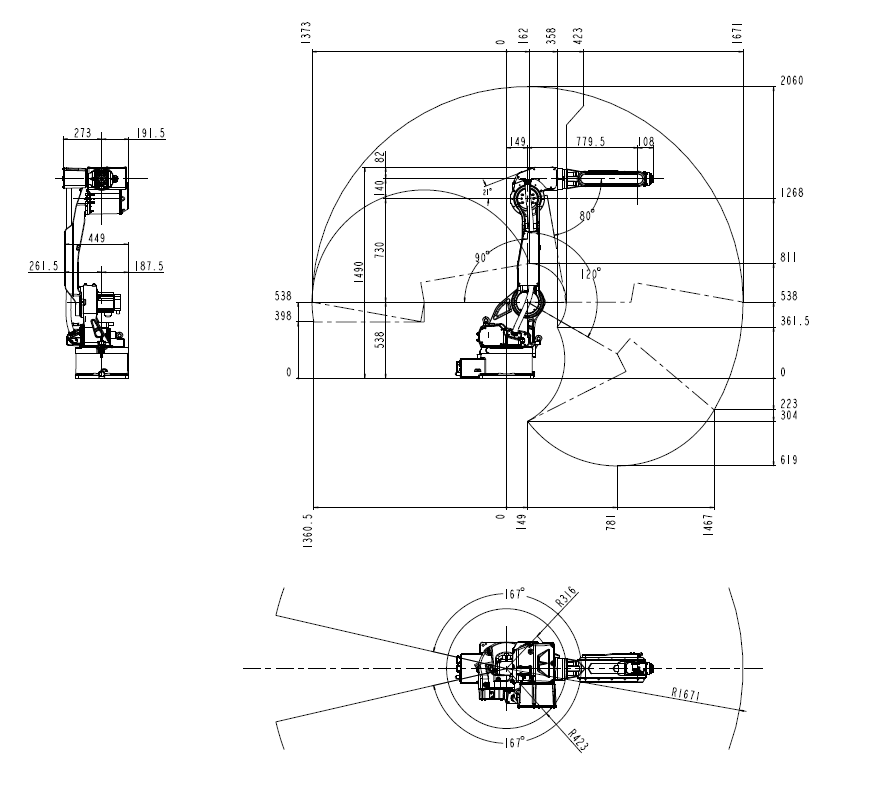
| 最大アームスパン | 1671 mm | |
| 動作範囲 | J1 | ±172&orm; |
| J2 | ﹢166º、﹣107º | |
| J3 | ﹢83º、﹣92º | |
| J4 | ±170&orm; | |
| J5 | ±125&orm; | |
| J6 | ±360&orm; | |
| マックス・スピード | J1 | 172&orm;/s |
| J2 | 172&orm;/s | |
| J3 | 183&orm;/s | |
| J4 | 430&orm;/s | |
| J5 | 430&orm;/s | |
| J6 | 584&orm;/s | |
| 許容トルク | J4 | 24.6N.m |
| J5 | 24.6N.m | |
| J6 | 9.8N.m | |
| 慣性モーメント | J4 | 0.63kg.m2; |
| J5 | 0.63kg.m2; | |
| J6 | 0.1kg.m2; | |
| ロボット本体重量 | 250kg | |
| 電力容量 | 3.3kVA | |
| キャビネット判 | 580 * 600 * 960mm | |
| 内閣重 | 130kg | |
| ソース | 三相XNUMX線 | |
| フォームのインストール | 地面、天井 | |