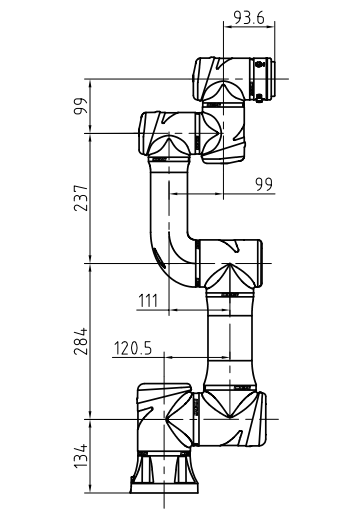
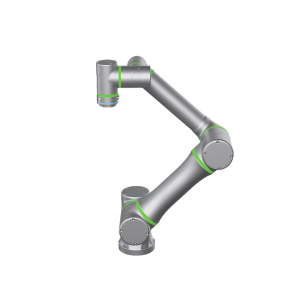
| მოდელი | R3-063S | |
| რობოტი Arm Net Eeight (კაბელის გარეშე) |
14KG | |
| Payload | 3KG | |
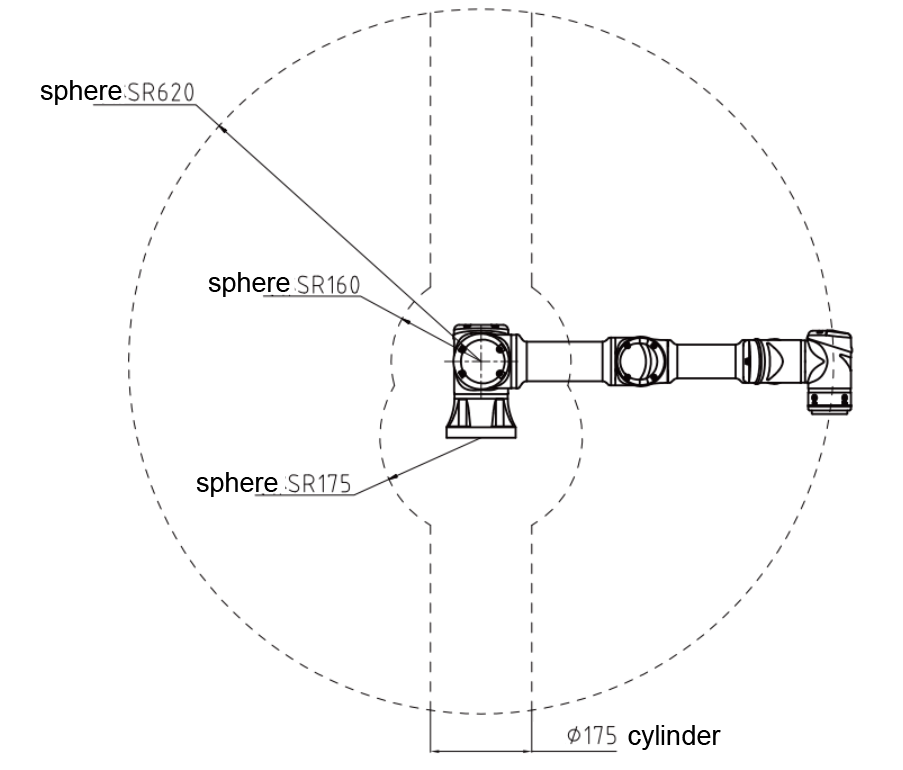
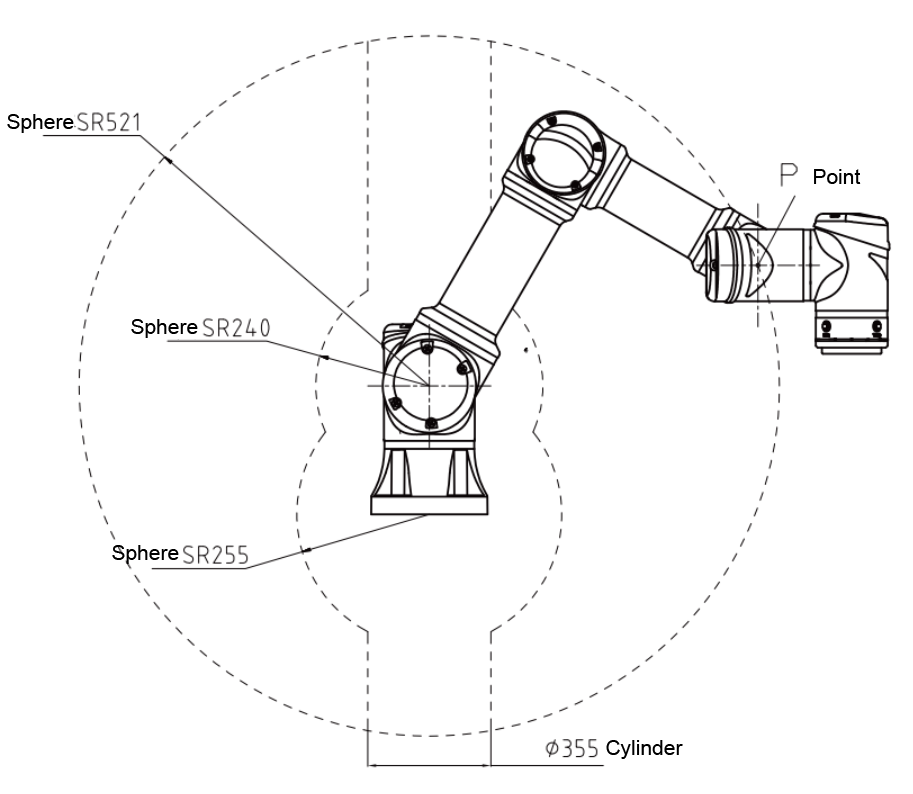
| Armspan | 620mm | |
| Თავისუფლების ხარისხი | 6 | |
| Motion Range |
ერთობლივი 1 | ± 360 ° |
| სახსარი 2 | ± 360 ° | |
| სახსარი 3 | ± 165 ° | |
| სახსარი 4 | ± 360 ° | |
| სახსარი 5 | ± 360 ° | |
| სახსარი 6 | ± 360 ° | |
| Motion სიჩქარის |
ერთობლივი 1 | 220 ° / წმ |
| სახსარი 2 | 220 ° / წმ | |
| სახსარი 3 | 240 ° / წმ | |
| სახსარი 4 | 360 ° / წმ | |
| სახსარი 5 | 360 ° / წმ | |
| სახსარი 6 | 360 ° / წმ | |
| EOA მაქსიმალური სიჩქარე | 2m / s | |
| განმეორებითი პოზიციონირების სიზუსტე (მაქსიმალური) | ± 0.02 მმ | |
| აბსოლუტური პოზიციონირების სიზუსტე (მაქსიმალური) | 0.5mm | |
| კონტროლი ავტობუსი/სიხშირე | EtherCAT/1kHz | |
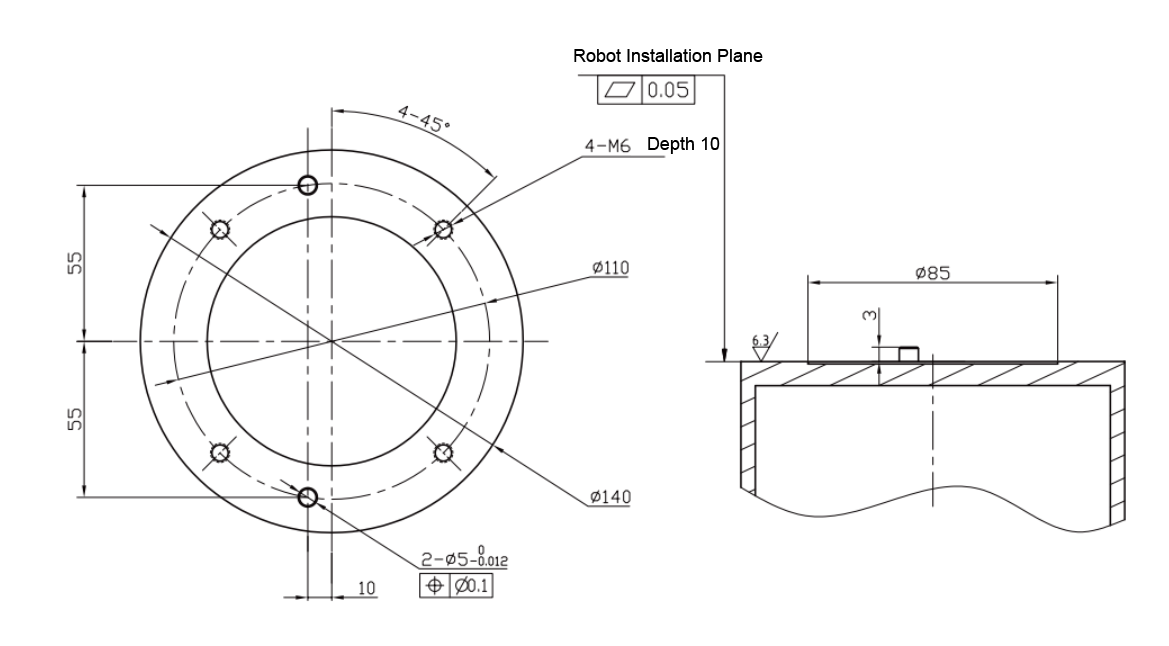
| ინსტალაციის მეთოდი | ნებისმიერი კუთხე | |
| ტიპიური სიმძლავრე | 150W | |
| მასალები | ალუმინის შენადნობი | |
| Გარემო ტემპერატურა | -5 ° C 55 ° C | |
| სამუშაო გარემო (ტენიანობა) | 5% 90% RH (კონდენსაციის გარეშე) |
|
| კაბელი სიგრძე | 4m | |
| IP კლასი | IP54 | |
| ხმაური | ≤60dB | |
| Tool End IO Port | ციფრული შეყვანა*2,ციფრული გამომავალი*2, ანალოგური შეყვანა*2, გამომავალი კვების წყარო 24V/1A*1 |
|
| ინსტრუმენტი საკომუნიკაციო პორტის დასრულება | EtherCAT*1;RS485*1; გამომავალი კვების წყარო 24V/1A*1 |
|