| მოდელი | QJRB180-1 | |
| ღერძის ნომერი | 4 | |
| Payload | 180kg | |
| გაიმეორეთ პოზიციონირება | ± 0.5 მმ | |
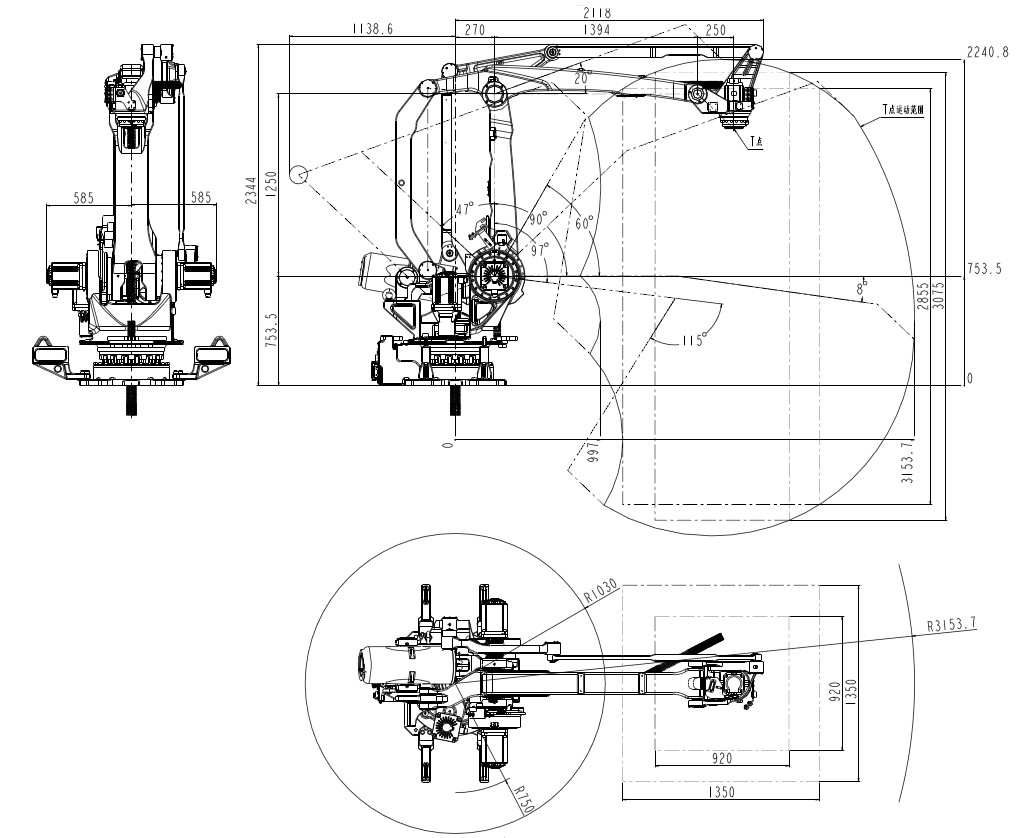
| მაქს არმსპანი | 3153.7mm | |
| მოძრაობის დიაპაზონი | J1 | ± 170º |
| J2 | ﹢95º, ﹣47º | |
| J3 | ﹢112º, ﹣20º | |
| J4 | ± 360º | |
| J5 | _ | |
| J6 | _ | |
| მაქსიმალური სიჩქარე | J1 | 129º/წმ |
| J2 | 132º/წმ | |
| J3 | 132º/წმ | |
| J4 | 298º/წმ | |
| J5 | _ | |
| J6 | _ | |
| დასაშვები ბრუნვა | J4 | _ |
| J5 | _ | |
| J6 | _ | |
| ინერციის მომენტი | J4 | 3.25 კგ.მ² |
| J5 | _ | |
| J6 | _ | |
| რობოტის სხეულის წონა | 1400kg | |
| სიმძლავრე მოცულობა | 17.5kVA | |
| კაბინეტის ზომა | 650 * 750 * 1150mm | |
| კაბინეტის წონა | 140kg | |
| წყარო | სამფაზიანი ხუთმავთული | |
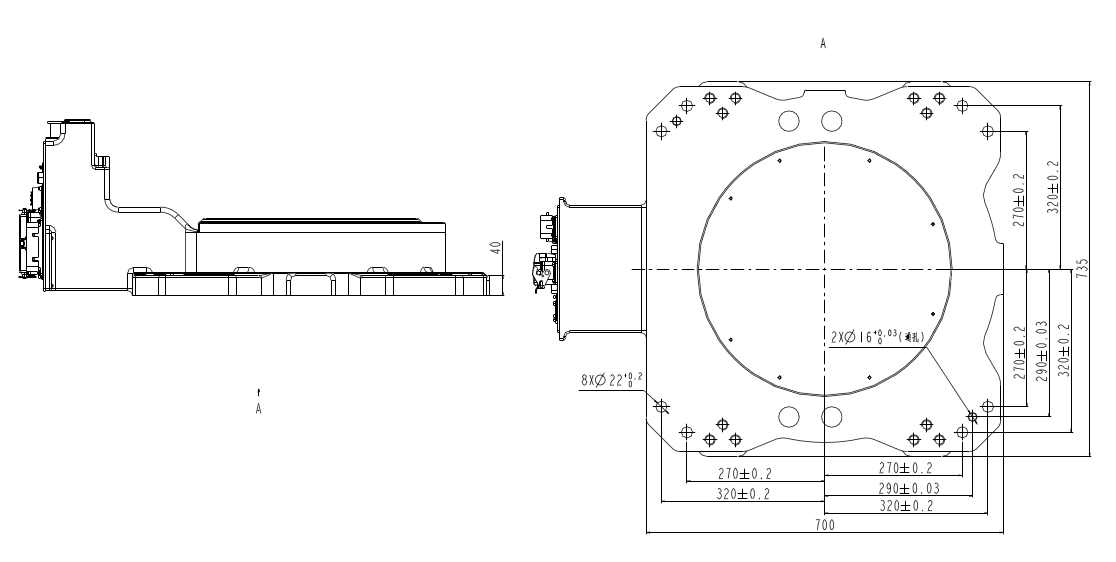
| ფორმის ინსტალაცია | Ground | |