| 모델 | R12-135S | |
| 로봇 Arm Net Eight (케이블 제외) |
36KG | |
| Payload | 12KG | |
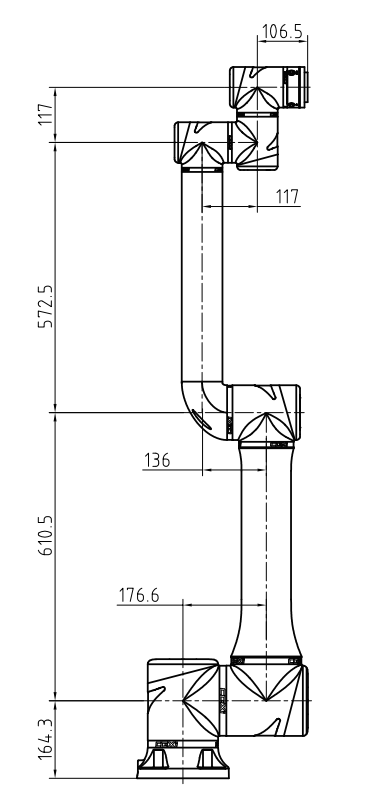
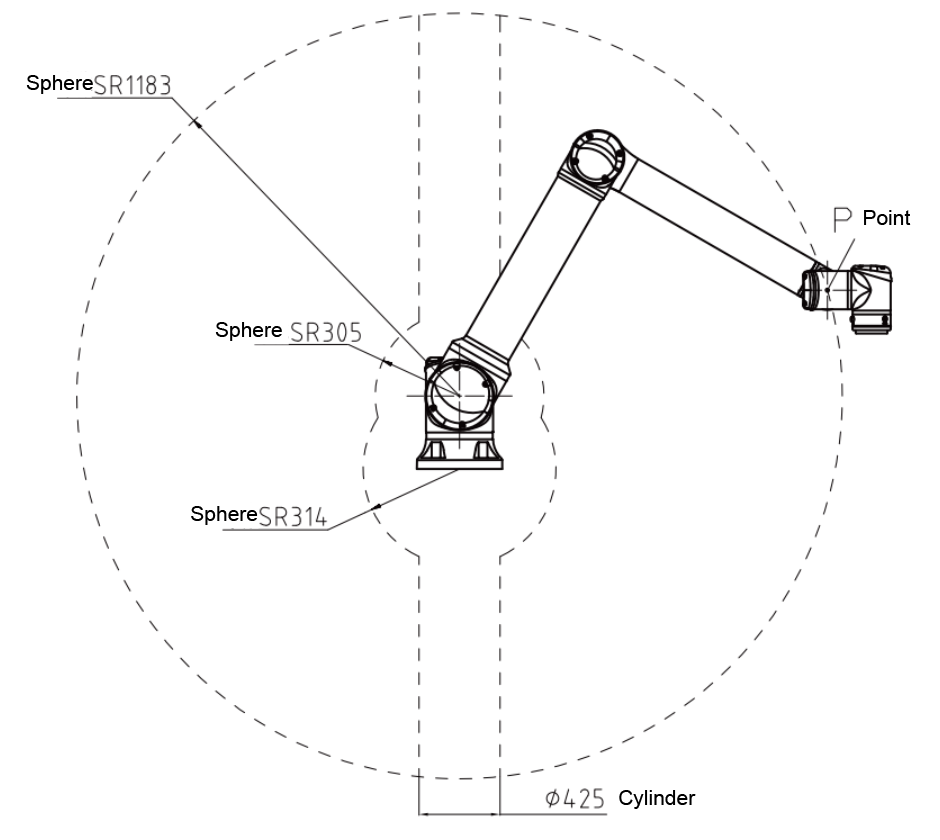
| 암스팬 | 1300mm | |
| 자유도 | 6 | |
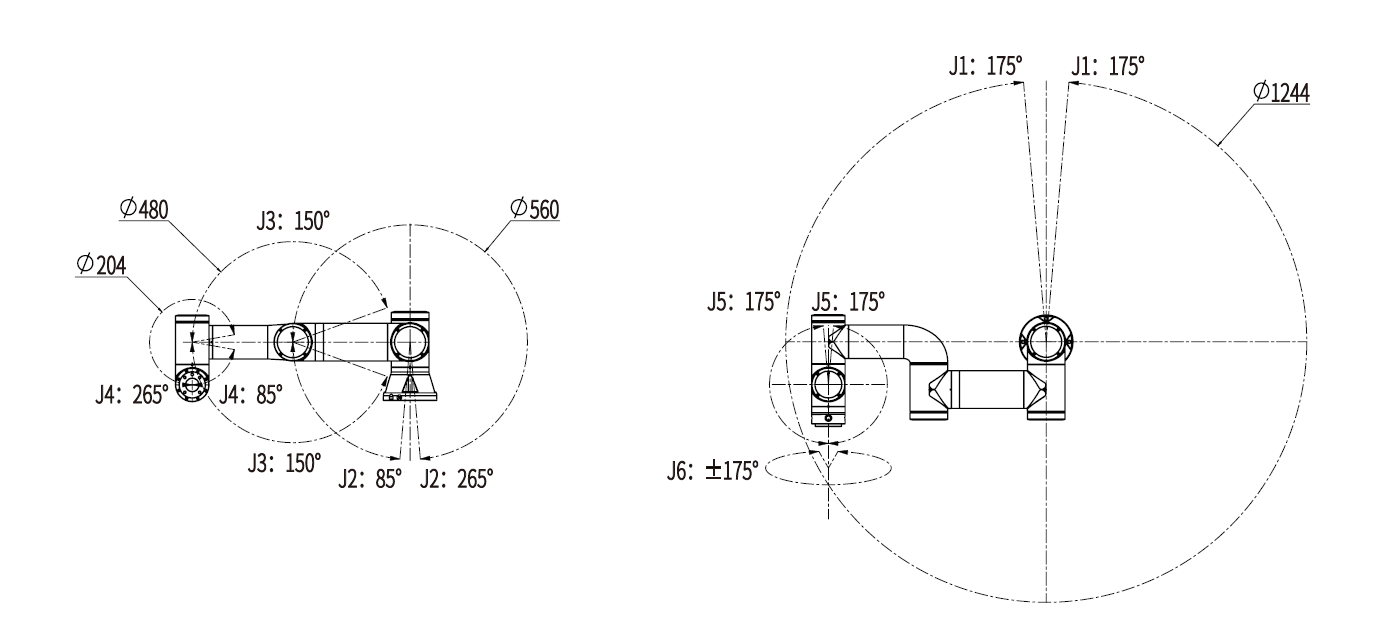
| 운동 범위 |
공동 1 | ± 360 ° |
| 관절 2 | ± 360 ° | |
| 관절 3 | ± 165 ° | |
| 관절 4 | ± 360 ° | |
| 관절 5 | ± 360 ° | |
| 관절 6 | ± 360 ° | |
| 운동 속도 |
공동 1 | 150 ° / s |
| 관절 2 | 150 ° / s | |
| 관절 3 | 210 ° / s | |
| 관절 4 | 240 ° / s | |
| 관절 5 | 240 ° / s | |
| 관절 6 | 240 ° / s | |
| EOA 최대 속도 | 3m / S | |
| 반복 위치 정확도(최대) | ± 0.03mm | |
| 절대 포지셔닝 정확도(최대) | 0.5mm | |
| 제어 버스/주파수 | EtherCAT/1kHz | |
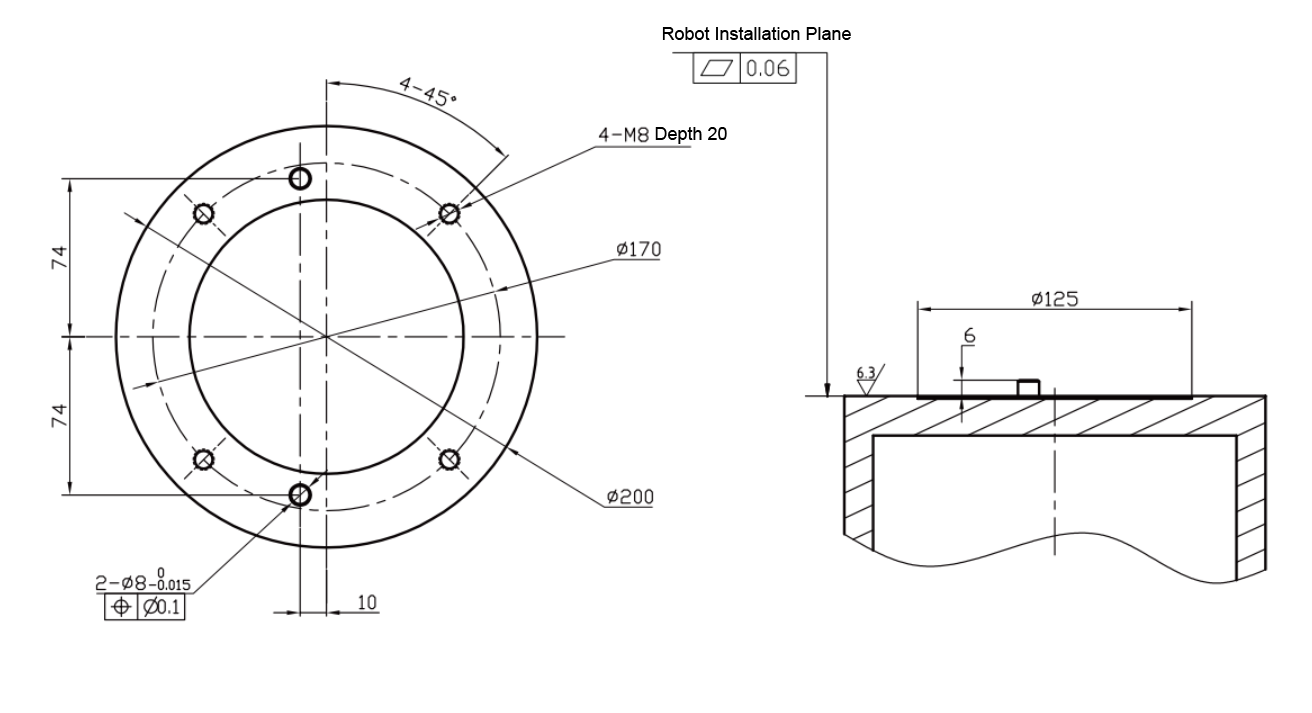
| 설치 방법 | 모든 각도 | |
| 일반적인 전력 | 550W | |
| 자재 | 알루미늄 합금 | |
| 주변 온도 | -5 ° C ~ 55 ° C | |
| 작업환경(습도) | 5 % ~ 90 % RH (결로가 없을 것) |
|
| 케이블 길이 | 6m | |
| IP 등급 | IP65 | |
| 노이즈 | ≤60dB | |
| 도구 끝 IO 포트 | 디지털 입력*2, 디지털 출력*2, 아날로그 입력*2, 출력 전원 공급 장치24V/1A*1 |
|
| 도구 통신 포트 종료 | EtherCAT*1, RS485*1, 출력 전원 공급 장치24V/1A*1 |
|