| Model | R12-135S | |
| Robot Uzbrój siatkę ósmą (bez kabli) |
36KG | |
| Ładunek | 12KG | |
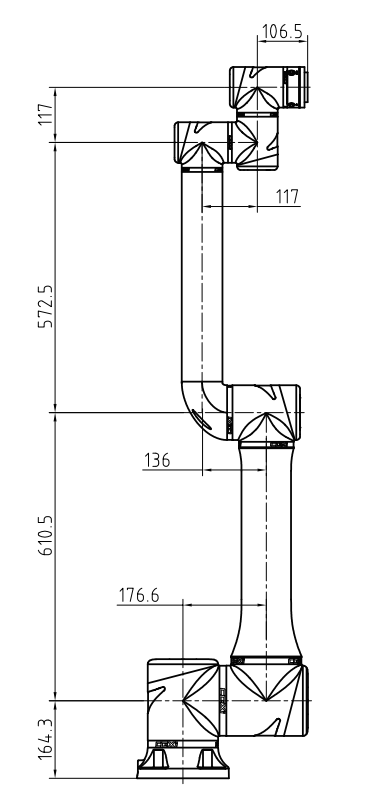
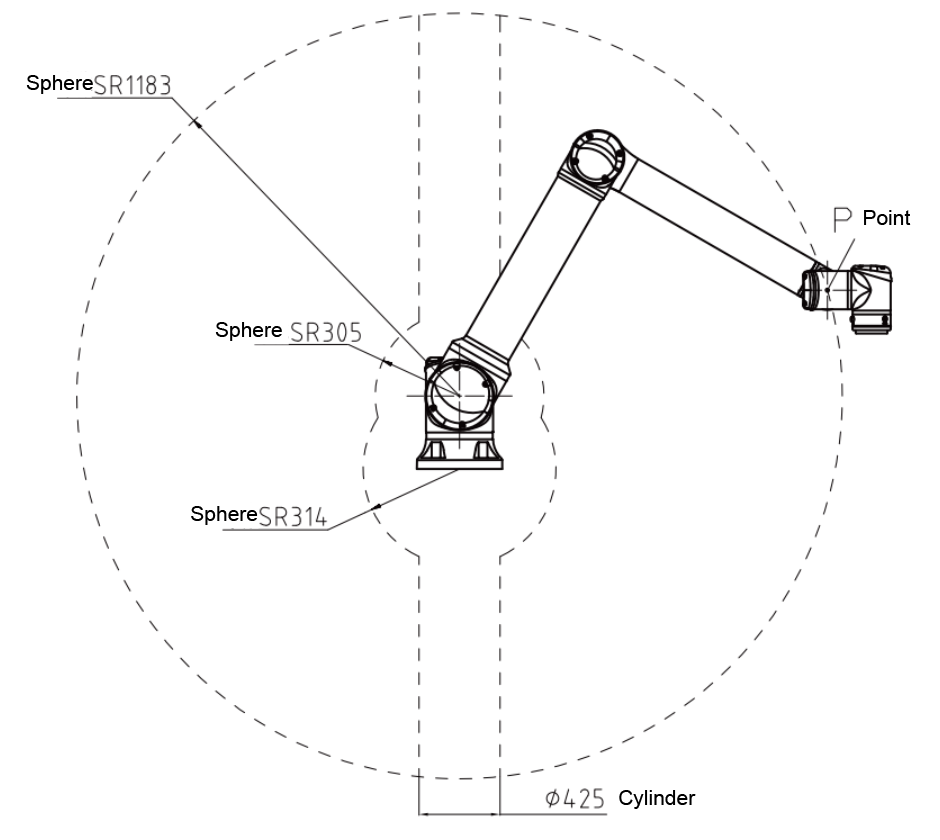
| Rozpiętość ramion | 1300mm | |
| Stopień wolności | 6 | |
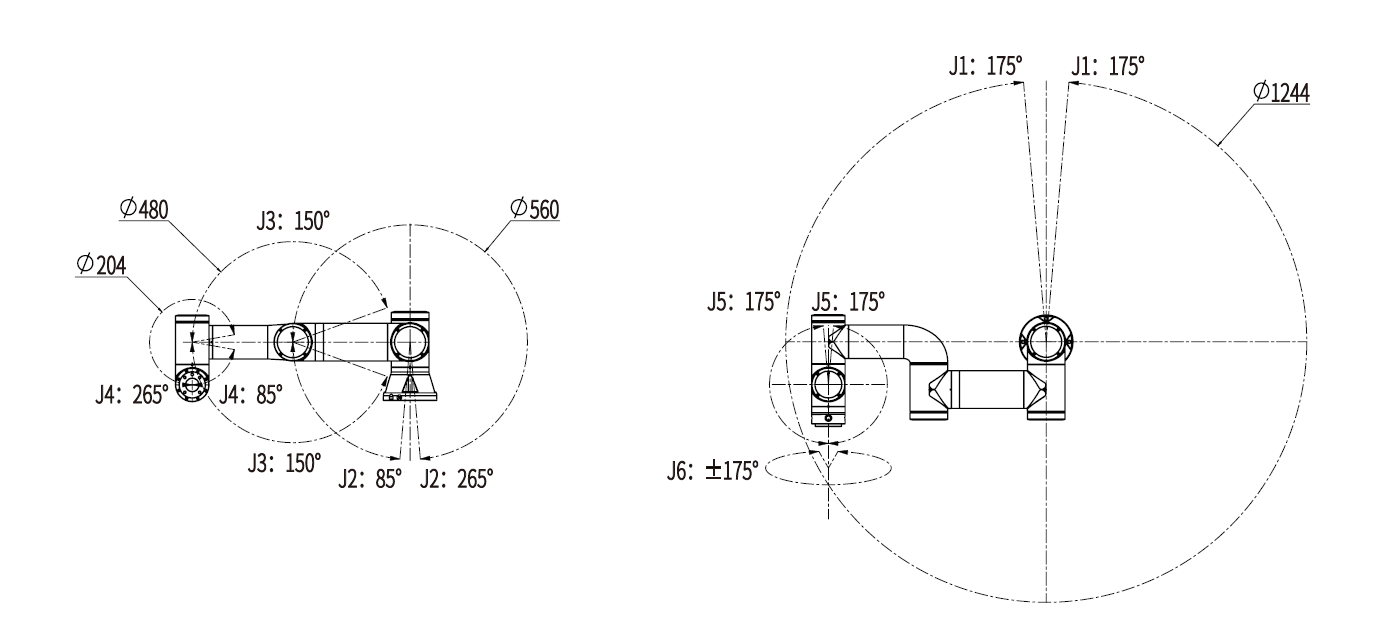
| Ruch łodzie |
Wspólne 1 | ± 360 ° |
| Połączenie 2 | ± 360 ° | |
| Połączenie 3 | ± 165 ° | |
| Połączenie 4 | ± 360 ° | |
| Połączenie 5 | ± 360 ° | |
| Połączenie 6 | ± 360 ° | |
| Ruch Prędkość |
Wspólne 1 | 150 ° / s |
| Połączenie 2 | 150 ° / s | |
| Połączenie 3 | 210 ° / s | |
| Połączenie 4 | 240 ° / s | |
| Połączenie 5 | 240 ° / s | |
| Połączenie 6 | 240 ° / s | |
| EOA Prędkość maksymalna | 3m / s | |
| Dokładność powtarzania pozycjonowania (maksymalna) | ± 0.03mm | |
| Absolutna dokładność pozycjonowania (maksymalna) | 0.5mm | |
| Sterowanie Magistrala/Częstotliwość | EterCAT/1 kHz | |
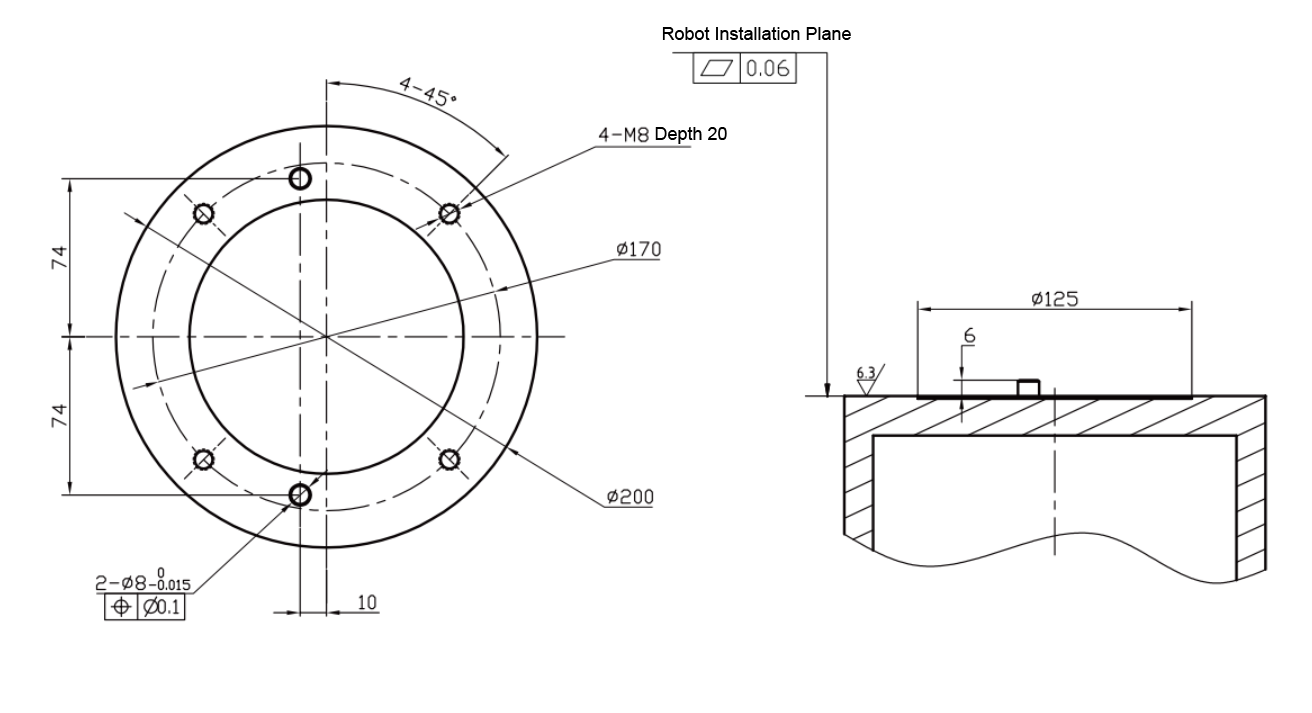
| Metoda instalacji | dowolny kąt | |
| Typowa moc | 550W | |
| Materiał | Stop aluminium | |
| Temperatura otoczenia | -5 ° C ~ 55 ° C | |
| Środowisko pracy (wilgotność) | 5% ~90% RH (bez kondensacji) |
|
| Długość kabla | 6m | |
| KLASA IP | IP65 | |
| Hałas | ≤60dB | |
| Port IO końca narzędzia | wejście cyfrowe*2, wyjście cyfrowe*2, wejście analogowe*2, zasilanie wyjściowe 24V/1A*1 |
|
| Narzędzie Zakończ port komunikacyjny | EtherCAT*1,RS485*1, zasilanie wyjściowe24V/1A*1 |
|