| Model | QJRB180-1 | |
| Numer osi | 4 | |
| Ładunek | 180 kg | |
| Powtórz pozycjonowanie | ± 0.5mm | |
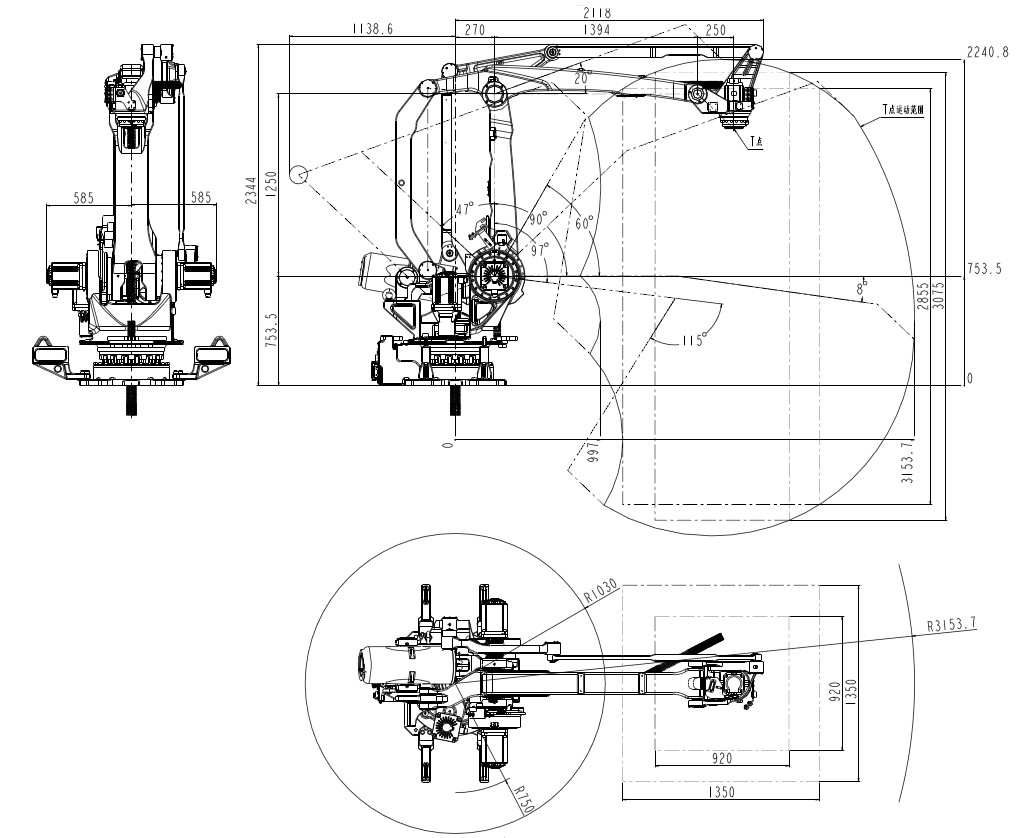
| Max Armspana | 3153.7mm | |
| Zakres ruchu | J1 | ± 170º |
| J2 | ﹢95°, ﹣47° | |
| J3 | ﹢112°, ﹣20° | |
| J4 | ± 360º | |
| J5 | _ | |
| J6 | _ | |
| Maksymalna prędkość | J1 | 129°/s |
| J2 | 132°/s | |
| J3 | 132°/s | |
| J4 | 298°/s | |
| J5 | _ | |
| J6 | _ | |
| Dopuszczalny moment obrotowy | J4 | _ |
| J5 | _ | |
| J6 | _ | |
| Moment bezwładności | J4 | 3.25kg.m² |
| J5 | _ | |
| J6 | _ | |
| Masa ciała robota | 1400 kg | |
| moc Pojemność | 17.5 kVA | |
| Gabinet Rozmiar | 650 * 750 * 1150mm | |
| Gabinet Waga | 140 kg | |
| Źródło | Trójfazowy pięcioprzewodowy | |
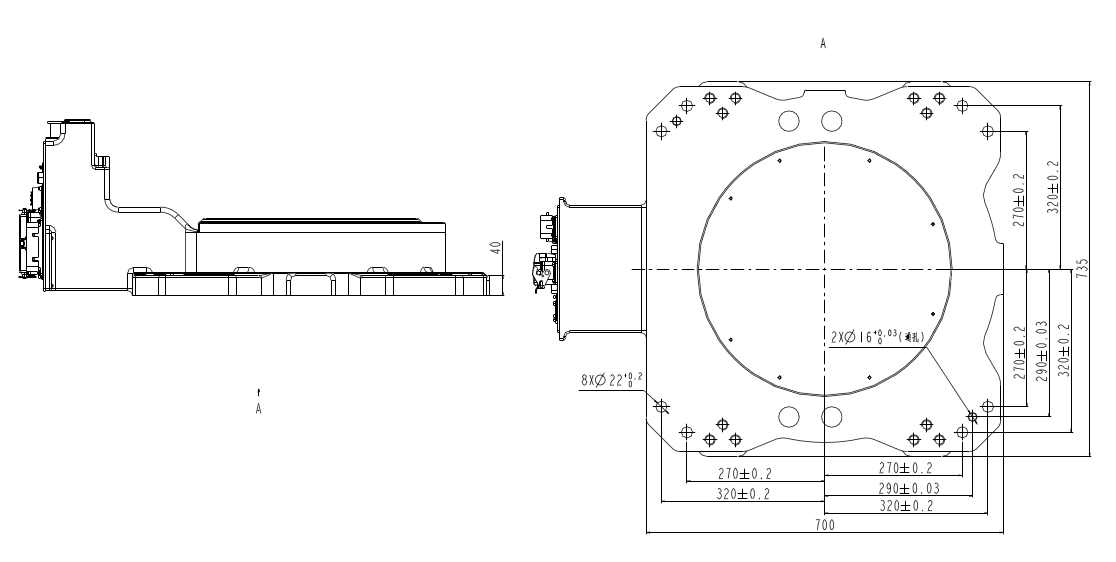
| Formularz instalacyjny | Ziemia | |