| Model robota | EVS6-600 | |
| Funkcjonować | transport materiałów, produkty 3C | |
| Razem osie | 4 | |
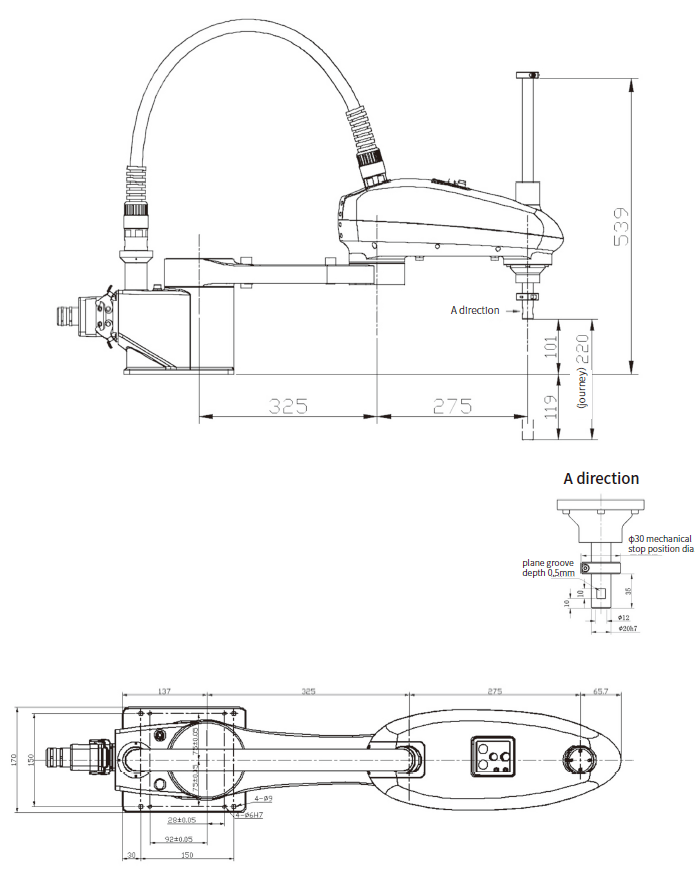
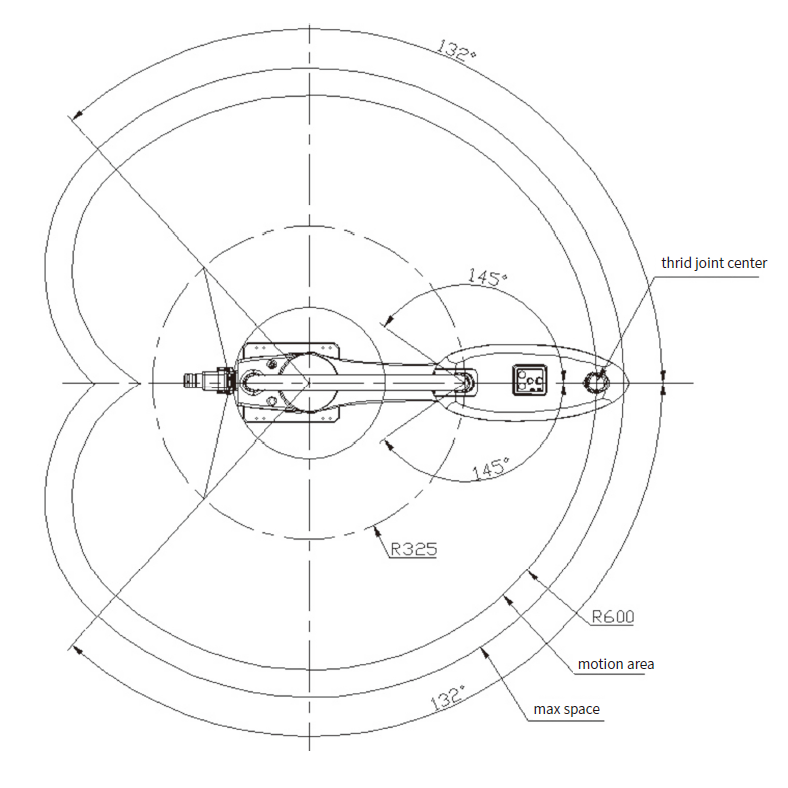
| Maksymalny zasięg | 600mm | |
| Ładunek | obciążenie znamionowe | 3 kg |
| maksymalne obciążenie | 6 kg | |
| Dopuszczalny moment bezwładności osi obrotowej | znamionowy moment obrotowy | 0.01 kg/m2 |
| maksymalny moment obrotowy | 0.12 kg/m2 | |
| Wielokrotna dokładność pozycjonowania | 1. oś + 2. oś | ±0.02mm |
| 3. oś (oś podnosząca) | ±0.01mm | |
| 4. oś (oś obrotu) | ±0.01&stopnia; | |
| maksymalna prędkość | 1. oś | 450 stopni/sek |
| 2. oś | 720 stopni/sek | |
| 3. oś (oś podnosząca) | 1000mm / s | |
| 4. oś (oś obrotu) | 2000 stopni/sek | |
| Maksymalny obszar operacyjny | 1. oś | ±132&stopnia; |
| 2. oś | ±145&stopnia; | |
| 3. oś (oś podnosząca) | 220mm | |
| 4. oś (oś obrotu) | ±360&stopnia; | |
| Parametry instalacji | Montaż na podłodze | |
| Waga robota | 17Kg | |
| Pobór energii | 0.8kw | |
| Środowisko instalacji | Temperatura | 0 ~ + 45 ℃ |
| Wilgotność | 20 ~ 80% wilgotności względnej (bez kondensacji) | |
| Wibracja | Poniżej 4.9 M/S² | |