| Model | QJRP10-1 | |
| Axis Number | 6 | |
| Payload | 10kg | |
| Repeat Positioning | ±0.5mm | |
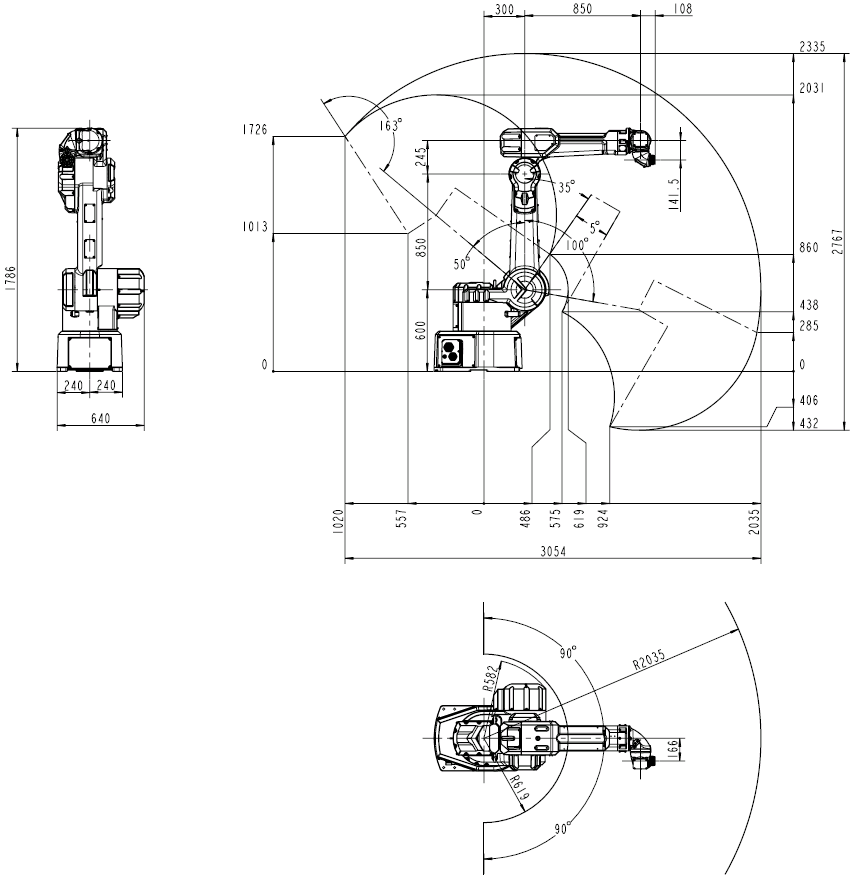
| Max Armspan | 2035mm | |
| Motion Range | J1 | ±95º |
| J2 | ﹢102º,﹣53º | |
| J3 | ﹢87º,﹣80º | |
| J4 | ±260º | |
| J5 | ±270º | |
| J6 | ±260º | |
| Max Speed | J1 | 109º/s |
| J2 | 126º/s | |
| J3 | 109º/s | |
| J4 | 361º/s | |
| J5 | 361º/s | |
| J6 | 361º/s | |
| Allowable Torque | J4 | 30.4N.m |
| J5 | 19.6N.m | |
| J6 | 9.8N.m | |
| Inertia Moment | J4 | 0.97kg.m² |
| J5 | 0.4kg.m² | |
| J6 | 0.1kg.m² | |
| Robot Body Weight | 370kg | |
| Power Capacity | 3.9kVA | |
| Cabinet Size | 650*750*1150mm | |
| Cabinet Weight | 120kg | |
| Source | Three-phase four-wire | |
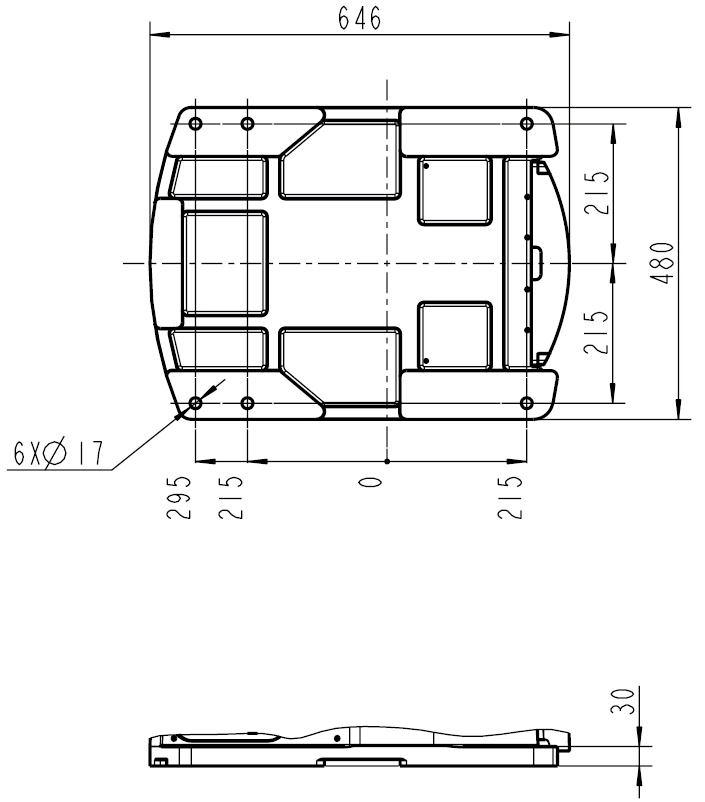
| Installing Form | Ground | |