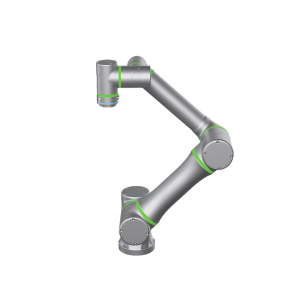
| Model | R3-063S | |
| Robot Arm Net Eight (fara cabluri) |
14KG | |
| Încărcătură utilă | 3KG | |
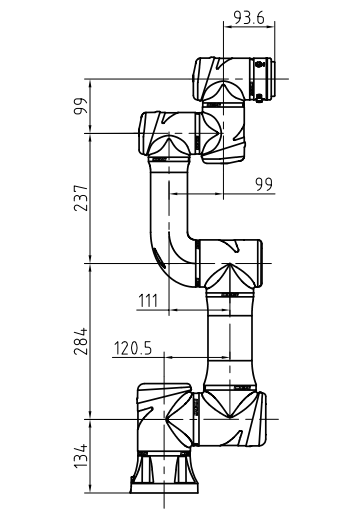
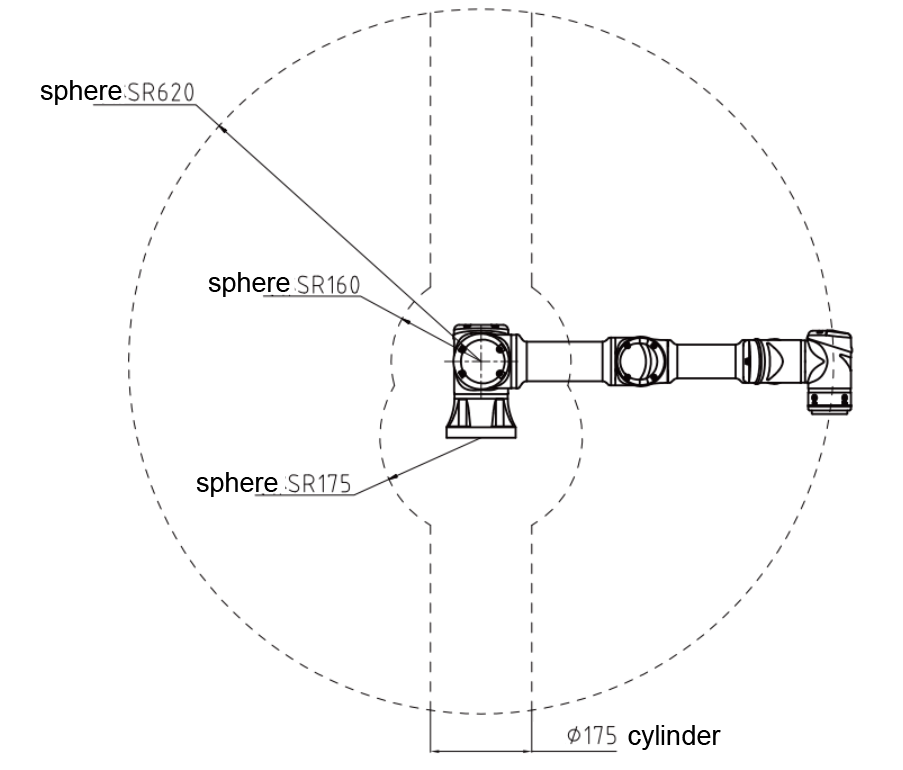
| Întinderea brațelor | 620mm | |
| Grad de libertate | 6 | |
| Mişcare Gamă |
Articulație 1 | ± 360 ° |
| Articulația 2 | ± 360 ° | |
| Articulația 3 | ± 165 ° | |
| Articulația 4 | ± 360 ° | |
| Articulația 5 | ± 360 ° | |
| Articulația 6 | ± 360 ° | |
| Mişcare Viteză |
Articulație 1 | 220 ° / s |
| Articulația 2 | 220 ° / s | |
| Articulația 3 | 240 ° / s | |
| Articulația 4 | 360 ° / s | |
| Articulația 5 | 360 ° / s | |
| Articulația 6 | 360 ° / s | |
| EOA Viteza maximă | 2m / s | |
| Precizie de poziționare repetată (maximum) | ± 0.02mm | |
| Precizie absolută a poziționării (maximum) | 0.5mm | |
| Control Bus/Frecvență | EtherCAT/1kHz | |
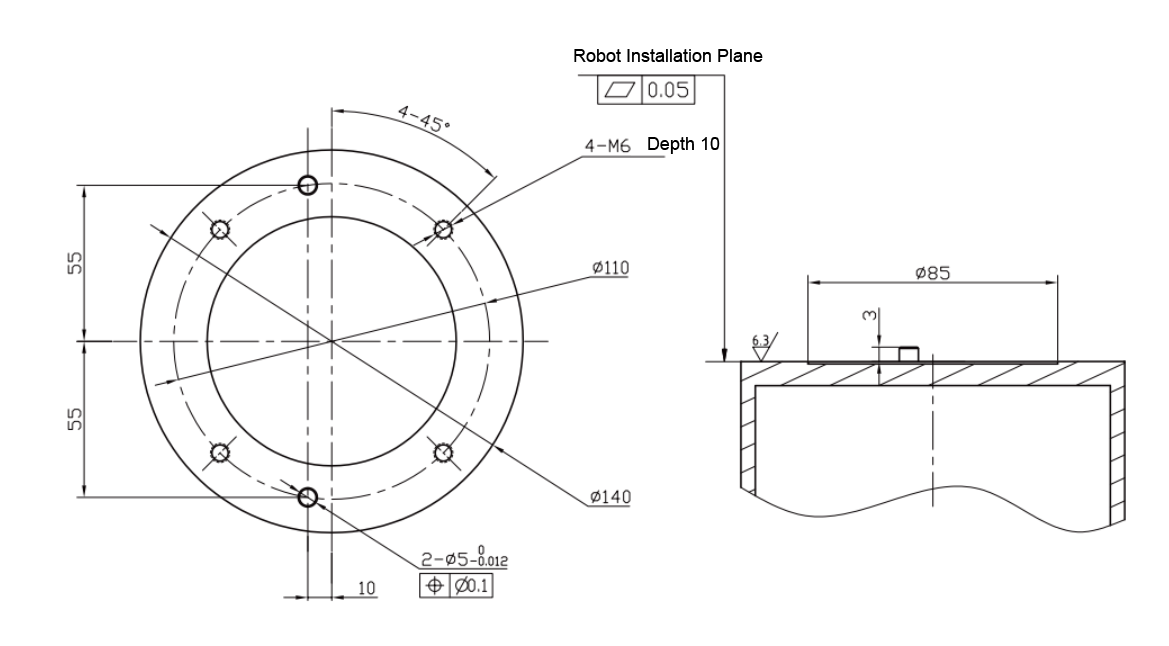
| Metoda de instalare | orice unghi | |
| Putere tipică | 150W | |
| Material | Aliaj de aluminiu | |
| Temperatura ambientala | -5 ° C ~ 55 ° C | |
| Mediul de lucru (umiditate) | 5% ~ 90% HR (fără condensare) |
|
| Lungimea cablului | 4m | |
| GRAD IP | IP54 | |
| Zgomot | ≤60dB | |
| Port IO de la capătul sculei | intrare digitală*2, ieșire digitală*2 intrare analogică*2, alimentare de ieșire 24V/1A*1 |
|
| Instrument Încheiați portul de comunicare | EtherCAT*1,RS485*1, sursa de iesire 24V/1A*1 |
|