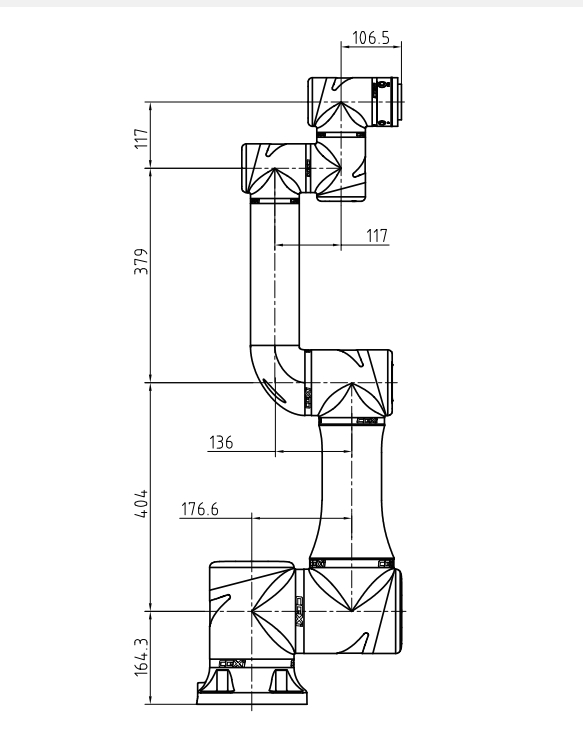
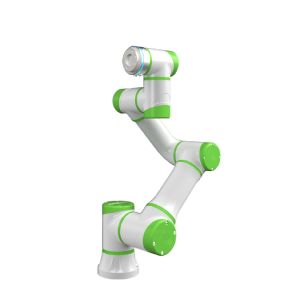
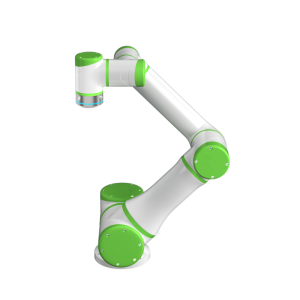
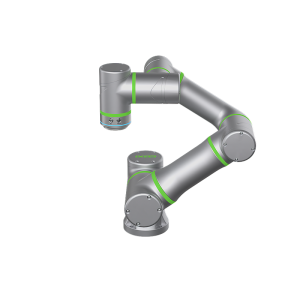
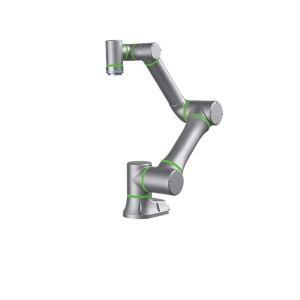
Рука-кобот в основном используется для погрузочно-разгрузочных работ, укладки на поддоны, захвата и размещения, а также для дуговой сварки, обеспечивая высокую надежность и отличные характеристики.
| Модель | XR18-EX-098S (взрывобезопасный) |
|
| Рука робота Net Eight (без кабелей) |
35кг | |
| полезная нагрузка | 18кг | |
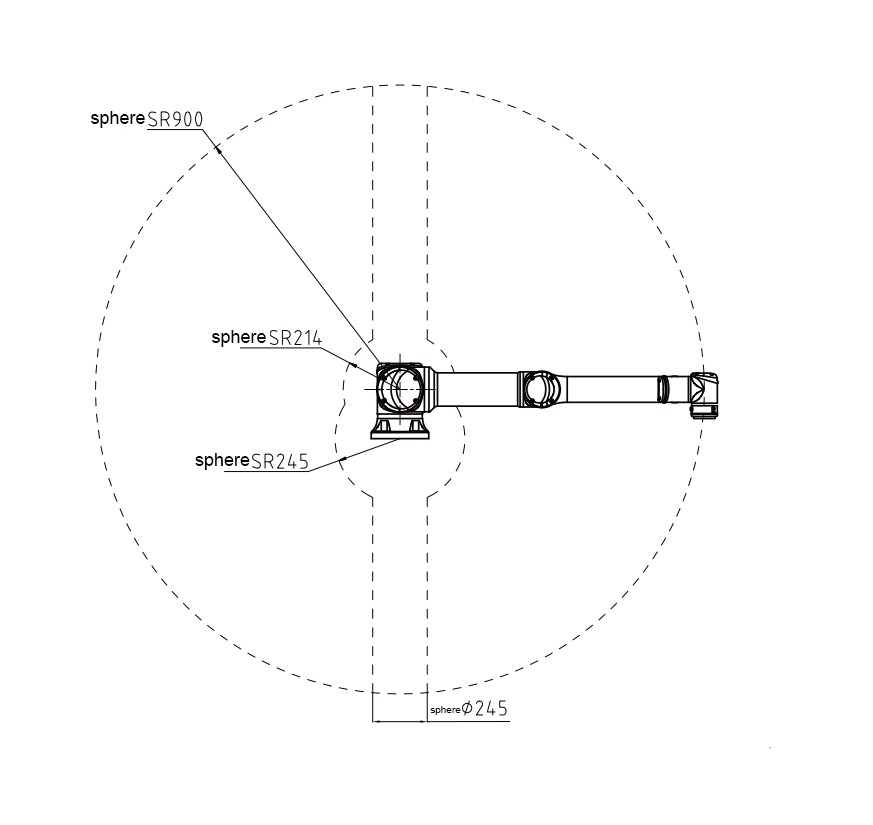
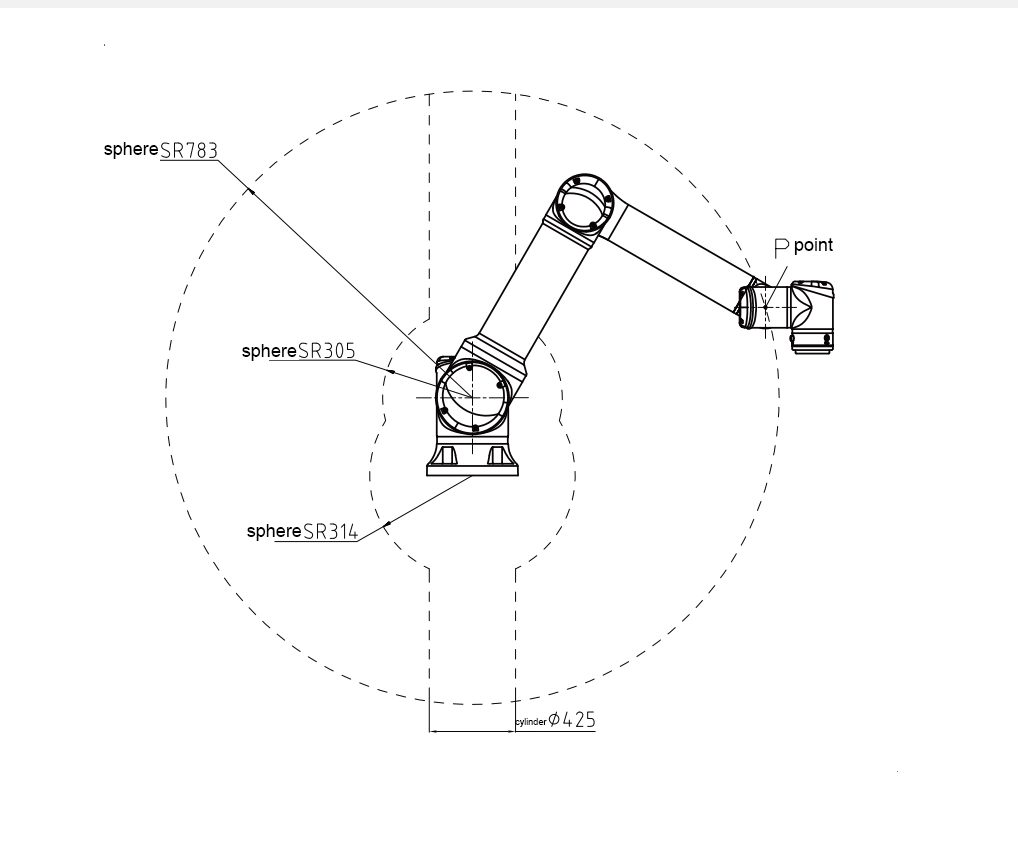
| Размах рук | 900 мм | |
| Степень свободы | 6 | |
| Диапазон движения | Шарнир 1 | ± 360 ° |
| Шарнир 2 | ± 360 ° | |
| Шарнир 3 | ± 165 ° | |
| Шарнир 4 | ± 360 ° | |
| Шарнир 5 | ± 360 ° | |
| Шарнир 6 | ± 360 ° | |
| Скорость движения | Шарнир 1 | 150 ° / с |
| Шарнир 2 | 150 ° / с | |
| Шарнир 3 | 210 ° / с | |
| Шарнир 4 | 240 ° / с | |
| Шарнир 5 | 240 ° / с | |
| Шарнир 6 | 240 ° / с | |
| Максимальная скорость ЭОА | 3m / s | |
| Повторяемая точность позиционирования (максимум) | ± 0.02mm | |
| Абсолютная точность позиционирования (максимум) | 0.5 мм | |
| Управляющая шина/частота | EtherCAT/1 кГц | |
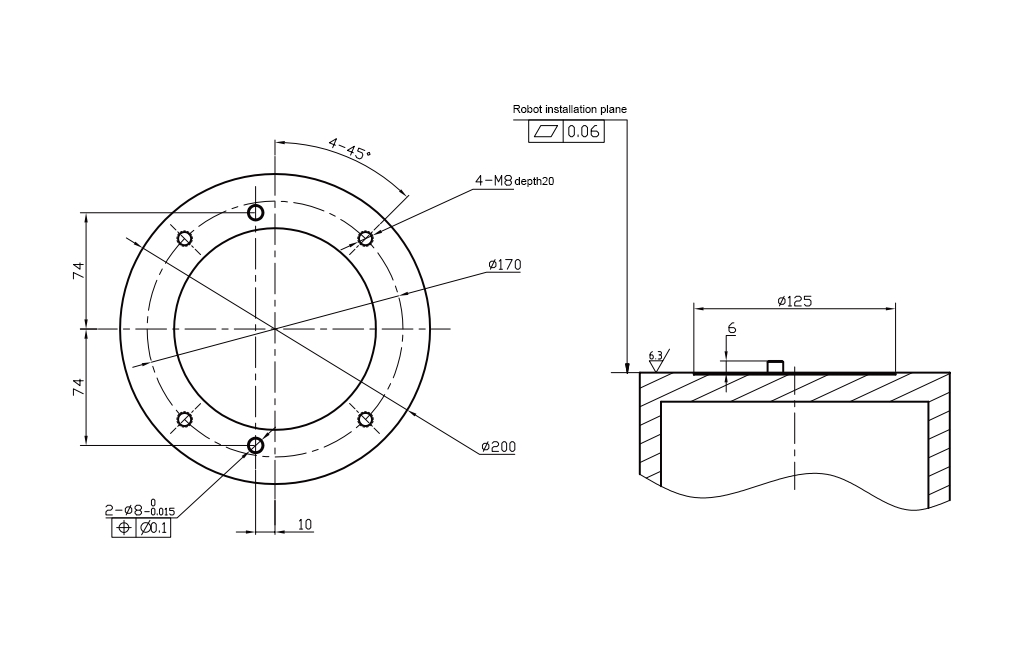
| Метод установки | под любым углом | |
| Типичная мощность | 550W | |
| Материалы | Алюминиевый сплав | |
| Температура окружающей среды | -5 ° С ~ 55 ° С | |
| Рабочая среда (влажность) | 5%~90% относительной влажности (без конденсации) | |
| Длина кабеля | 5m | |
| СТЕПЕНЬ IP | IP68 | |
| Шум | ≤60dB | |
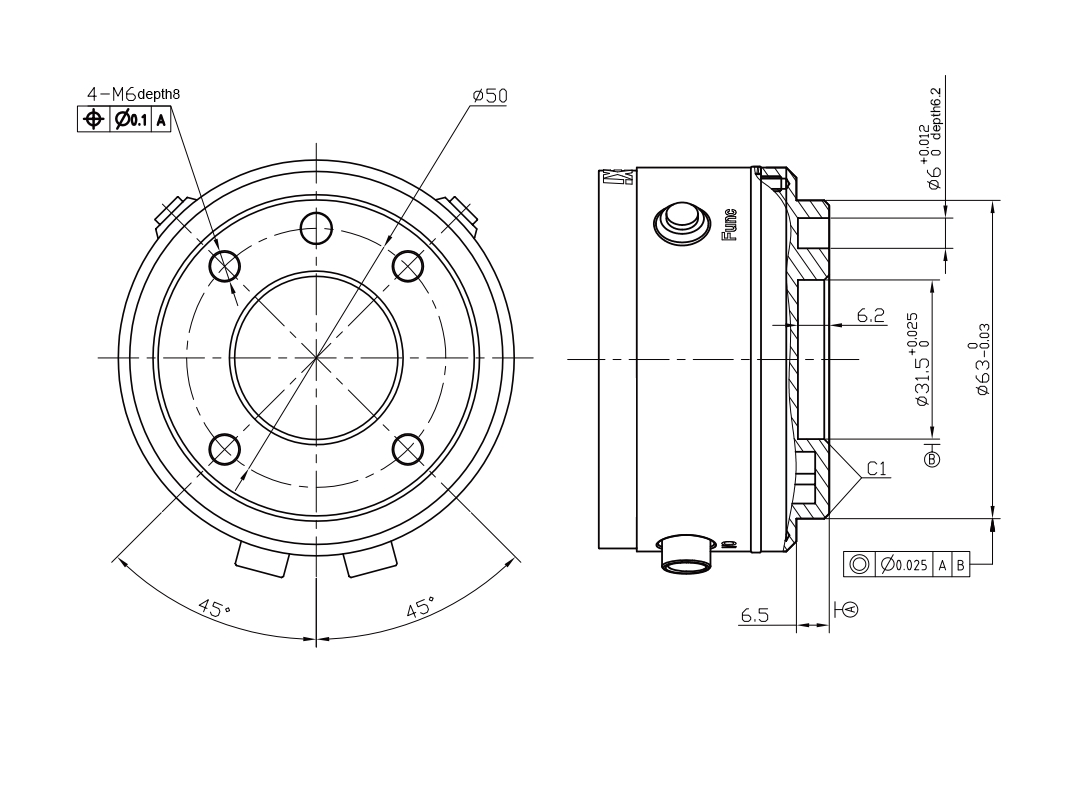
| Порт ввода-вывода на конце инструмента | цифровой вход*2, цифровой выход*2, аналоговый вход * 2, выходное питание 24 В/1 А * 1 |
|
| Коммуникационный порт на конце инструмента | цифровой вход*2, цифровой выход*2, аналоговый вход * 2, выходное питание 24 В/1 А * 1 |
|
| Ex db eb ib mb pxb IIC T6 Gb Ex ib mb xb tb IIIC T85℃ Db |
||