| Model | EV10-1450 |
| Degree of Freedom | 6 |
| Payload | 10 kg |
| Repeated Positioning Accuracy | ±0.05mm |
| Self Weight | Around 190 kg |
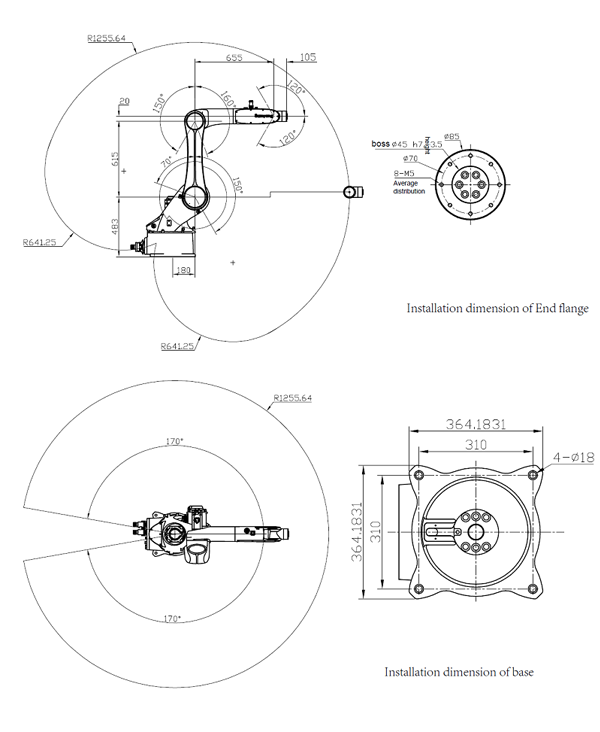
| Installation Method | Ground Mounted |
| Power Capacity | 4kw |
| Power Supply | Three-phase 380V |
| Maximum Reach Distance | 1450 mm |
| Axis J1(turn) | ±170° |
| Axis J2(lower arm swinging) | +70°— -150° |
| Axis J3(uper arm swinging) | +150°— -90° |
| Axis J4(arm rotary) | ±170° |
| Axis J5(wrist pitch) | ±120° |
| Axis J6(wrist rotary) | ±360° |
| Axis J1(turn) | 170°/s |
| Axis J2(lower arm swinging) | 110°/s |
| Axis J3(uper arm swinging) | 240°/s |
| Axis J4(arm rotary) | 300°/s |
| Axis J5(wrist pitch) | 300°/s |
| Axis J6(wrist rotary) | 375°/s |
| End flange | solid |
| Upside Down Installation | Yes |
| Main Application | Handling,assembly, sorting,material loading and unloading etc. |