| Modello | R12-135S | |
| Robot: braccio Net Eight (senza cavi) |
36KG | |
| Carico utile | 12KG | |
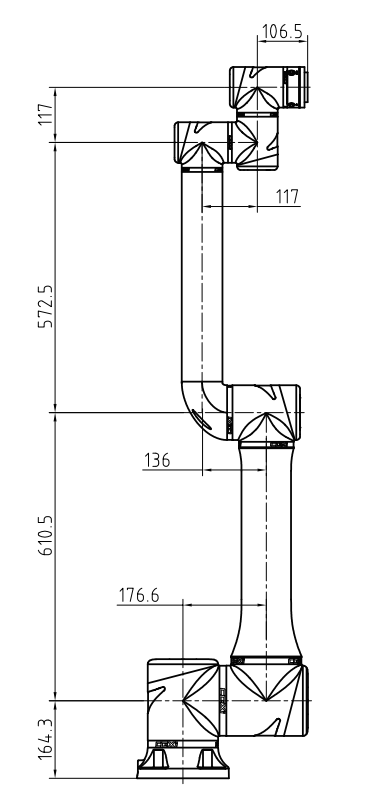
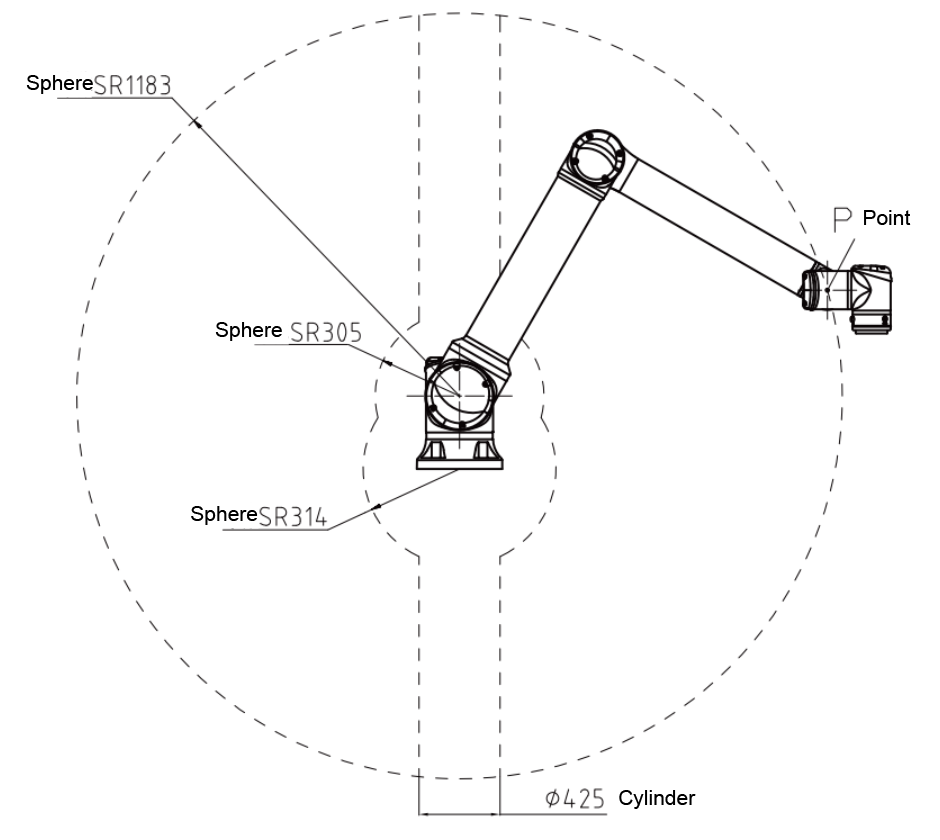
| Apertura delle braccia | 1300mm | |
| Grado di libertà | 6 | |
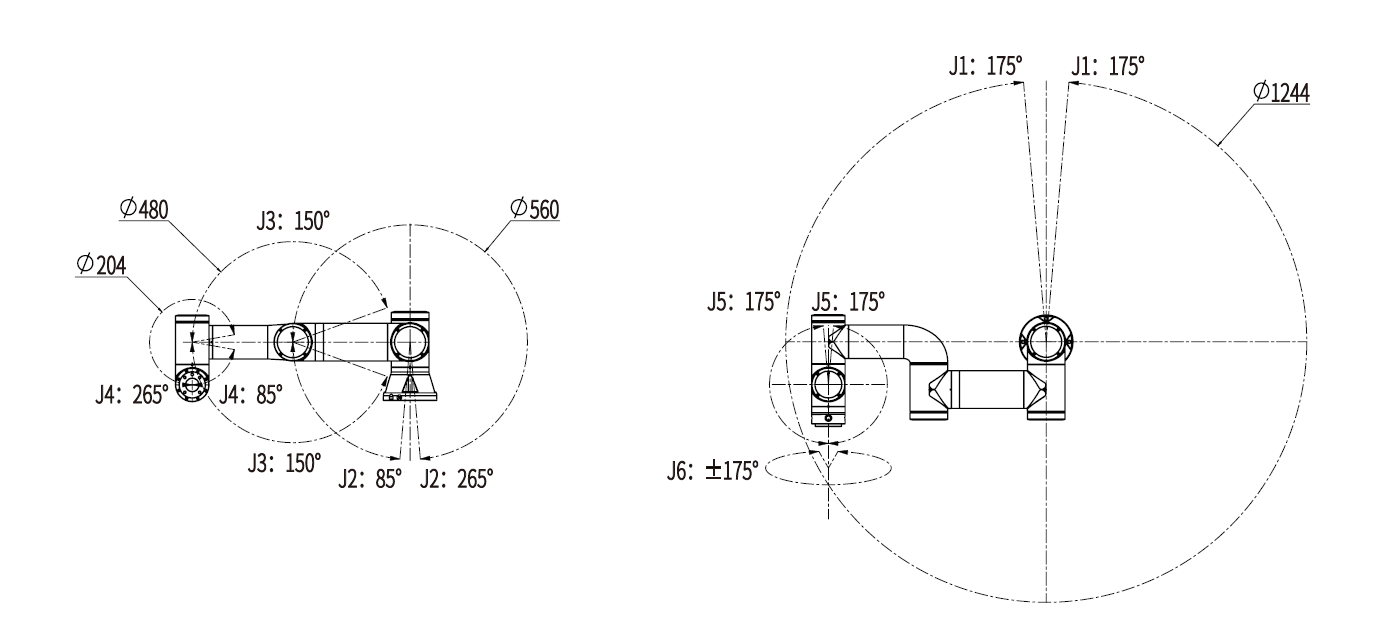
| Movimento Escursione |
Giunto 1 | ± 360 ° |
| Giunto 2 | ± 360 ° | |
| Giunto 3 | ± 165 ° | |
| Giunto 4 | ± 360 ° | |
| Giunto 5 | ± 360 ° | |
| Giunto 6 | ± 360 ° | |
| Movimento Velocità |
Giunto 1 | 150 ° / s |
| Giunto 2 | 150 ° / s | |
| Giunto 3 | 210 ° / s | |
| Giunto 4 | 240 ° / s | |
| Giunto 5 | 240 ° / s | |
| Giunto 6 | 240 ° / s | |
| EOA Velocità massima | 3m / s | |
| Ripetizione della precisione di posizionamento (massima) | ± 0.03mm | |
| Assoluta Precisione di posizionamento (massima) | 0.5mm | |
| Controllo Bus/Frequenza | EtherCAT/1kHz | |
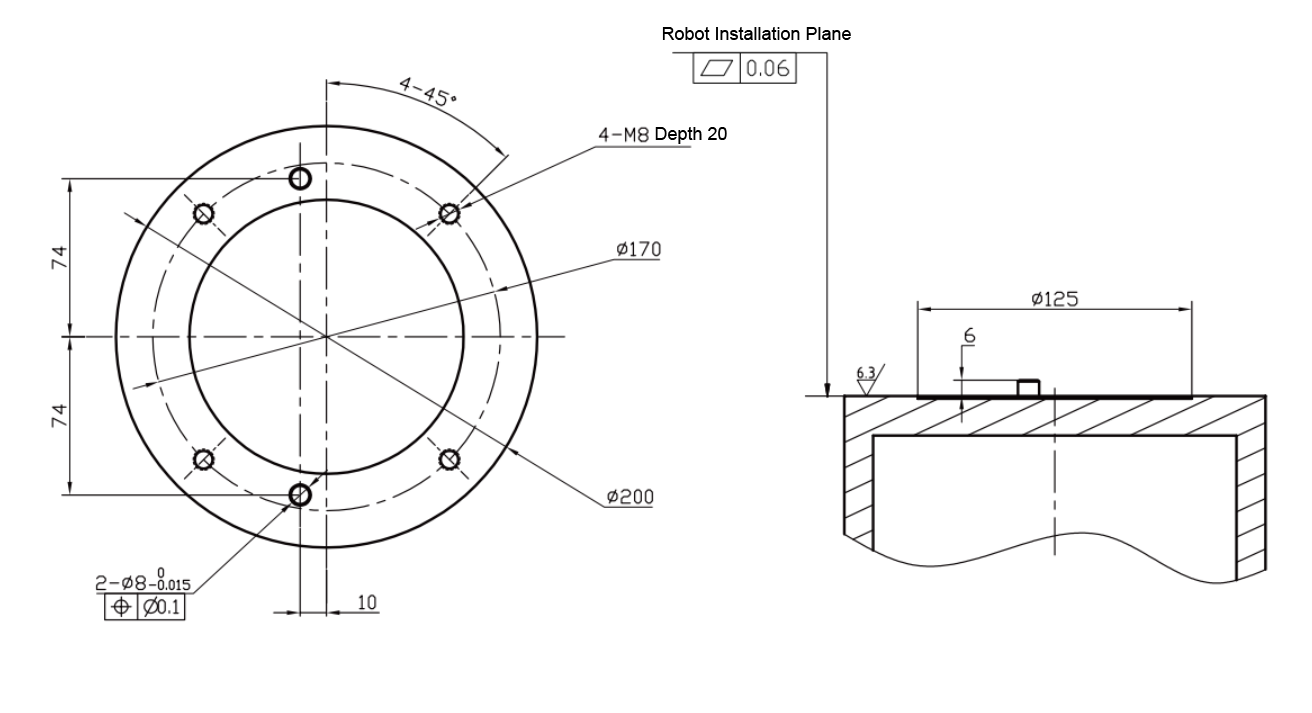
| Metodo di installazione | qualsiasi angolo | |
| Tipica potenza | 550W | |
| Materiali | Lega di alluminio | |
| Temperatura ambiente | -5 ° C ~ 55 ° C | |
| Ambiente di lavoro (umidità) | 5%~90%UR (senza condensa) |
|
| Lunghezza del cavo | 6m | |
| GRADO IP | IP65 | |
| Rumore | ≤60dB | |
| Porta IO estremità utensile | ingresso digitale*2, uscita digitale*2, ingresso analogico*2, alimentazione in uscita24V/1A*1 |
|
| Strumento Termina porta di comunicazione | EtherCAT*1, RS485*1, alimentazione in uscita24 V/1 A*1 |
|