კობოტის მკლავი ძირითადად გამოიყენება დამუშავებისთვის, პალეტიზაციისთვის, ამოსაღებად და დასაყენებლად, ასევე რკალის შესადუღებლად, მაღალი საიმედოობით და შესანიშნავი აკნე.
| მოდელი | XR18-EX-138S (აფეთქებაგამძლე) |
|
| Robot Arm Net Eeight (კაბელის გარეშე) |
35kg | |
| Payload | 18kg | |
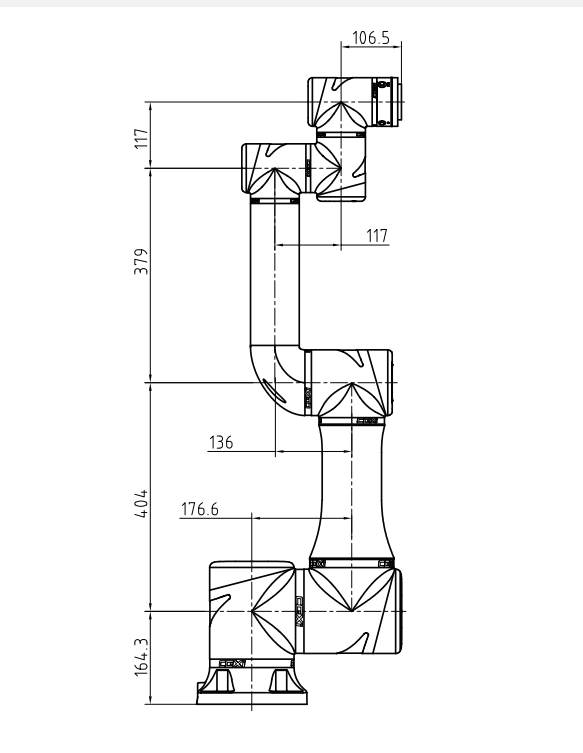
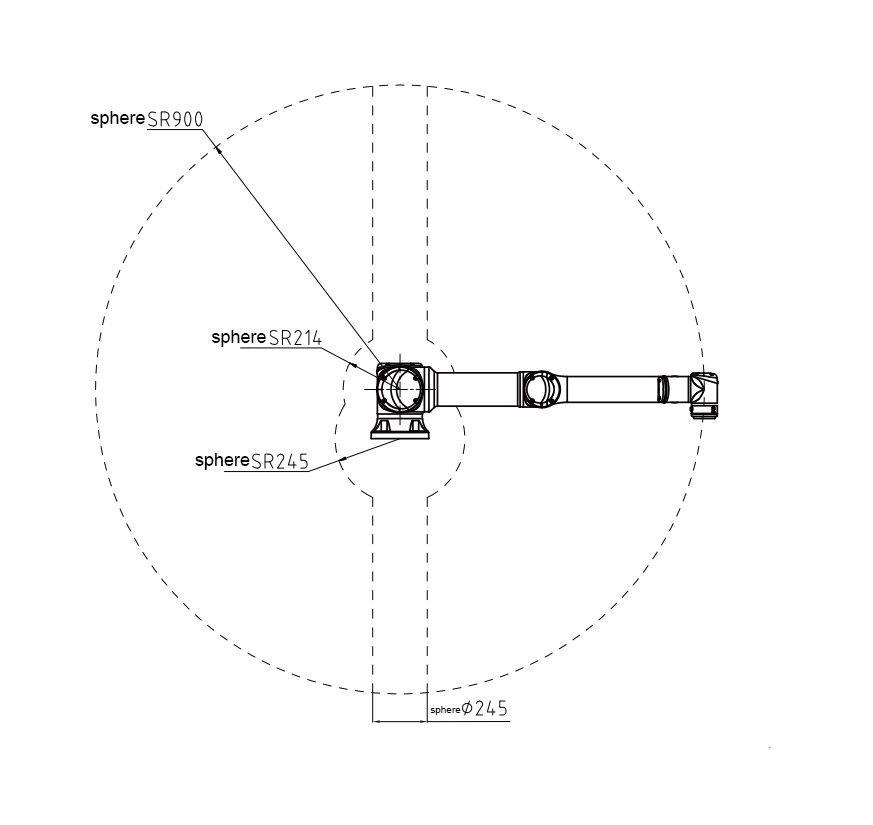
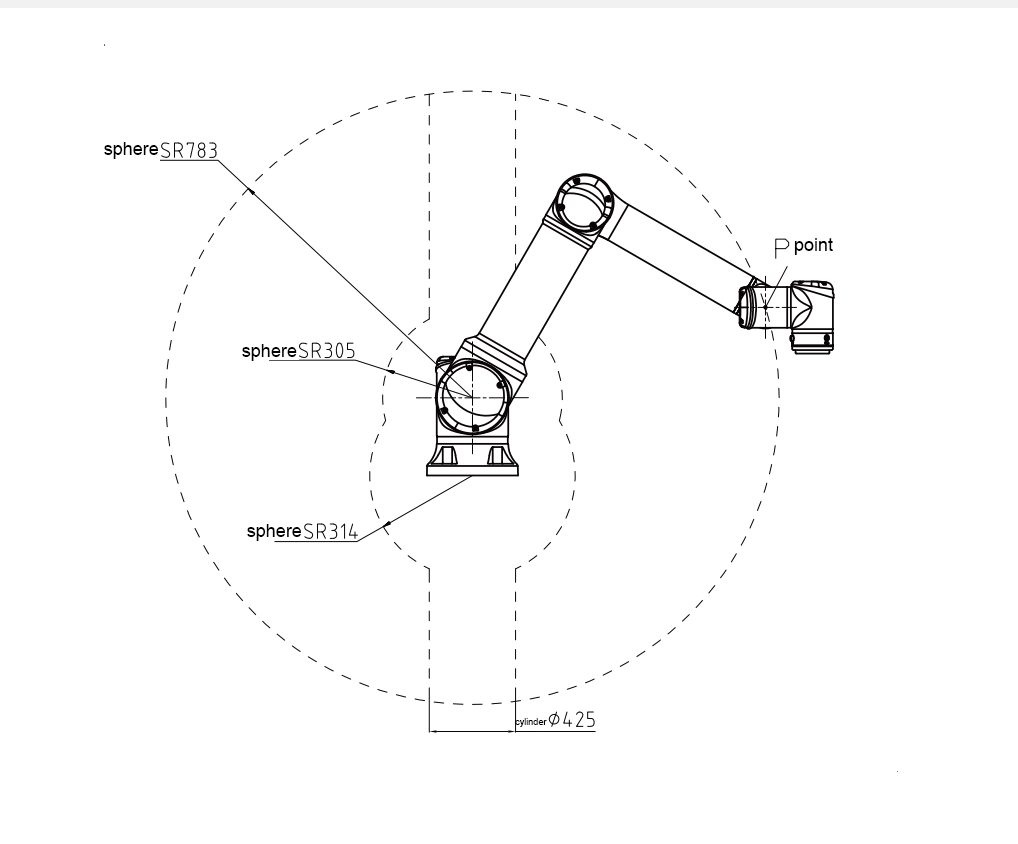
| Armspan | 900mm | |
| Თავისუფლების ხარისხი | 6 | |
| მოძრაობის დიაპაზონი | სახსარი 1 | ± 360 ° |
| სახსარი 2 | ± 360 ° | |
| სახსარი 3 | ± 165 ° | |
| სახსარი 4 | ± 360 ° | |
| სახსარი 5 | ± 360 ° | |
| სახსარი 6 | ± 360 ° | |
| მოძრაობის სიჩქარე | სახსარი 1 | 150 ° / წმ |
| სახსარი 2 | 150 ° / წმ | |
| სახსარი 3 | 210 ° / წმ | |
| სახსარი 4 | 240 ° / წმ | |
| სახსარი 5 | 240 ° / წმ | |
| სახსარი 6 | 240 ° / წმ | |
| EOA მაქსიმალური სიჩქარე | 3m / s | |
| განმეორებითი პოზიციონირების სიზუსტე (მაქსიმალური) | ± 0.03 მმ | |
| პოზიციონირების აბსოლუტური სიზუსტე (მაქსიმალური) | 0.5mm | |
| საკონტროლო ავტობუსი/სიხშირე | EtherCAT/1kHz | |
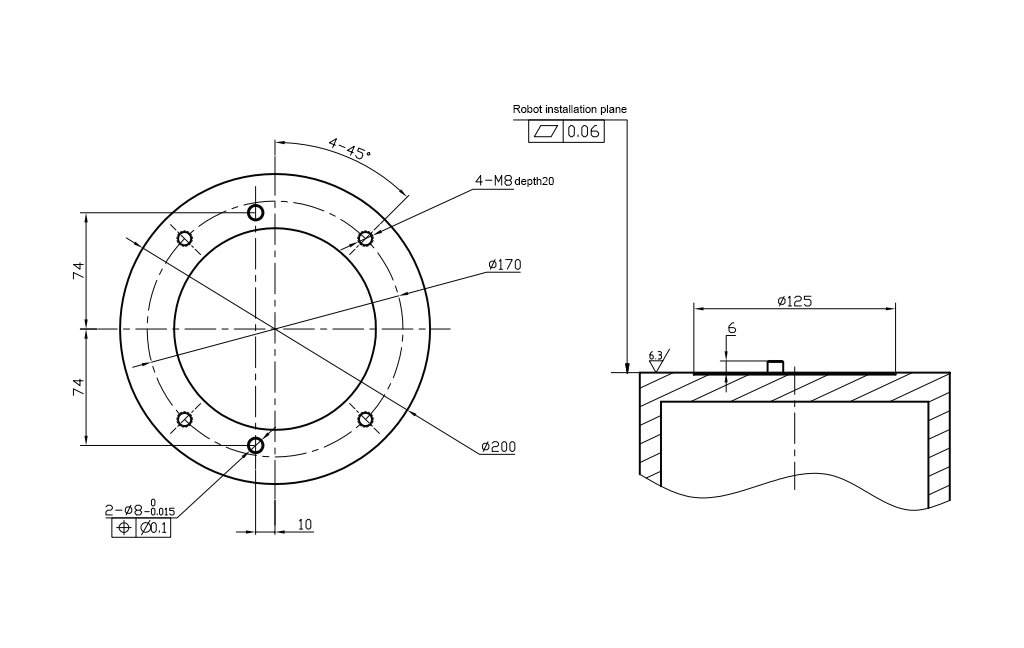
| დაყენების მეთოდი | ნებისმიერი კუთხე | |
| ტიპიური ძალა | 550W | |
| მასალები | ალუმინის დისკები | |
| გარემო ტემპერატურა | -5 ° C 55 ° C | |
| სამუშაო გარემო (ტენიანობა) | 5% - 90% RH (კონდენსაციის გარეშე) | |
| საკაბელო სიგრძე | 5m | |
| IP კლასი | IP68 | |
| ხმაური | ≤60dB | |
| Tool End IO Port | ციფრული შეყვანა*2,ციფრული გამომავალი*2, ანალოგური შეყვანა*2, გამომავალი კვების წყარო 24V/1A*1 |
|
| Tool End საკომუნიკაციო პორტი | ციფრული შეყვანა*2,ციფრული გამომავალი*2, ანალოგური შეყვანა*2, გამომავალი კვების წყარო 24V/1A*1 |
|
| Ex db eb ib mb pxb IIC T6 Gb Ex ib mb xb tb IIIC T85℃ Db |
||