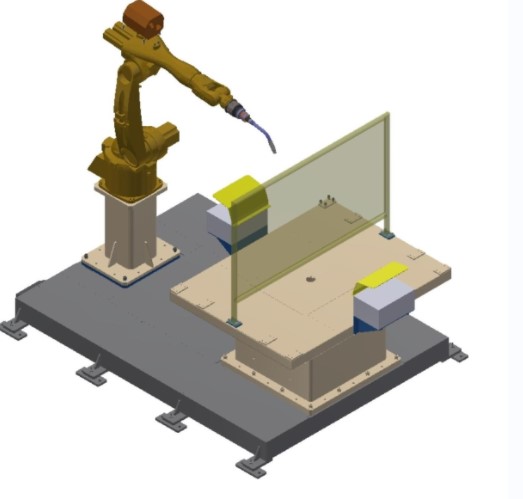
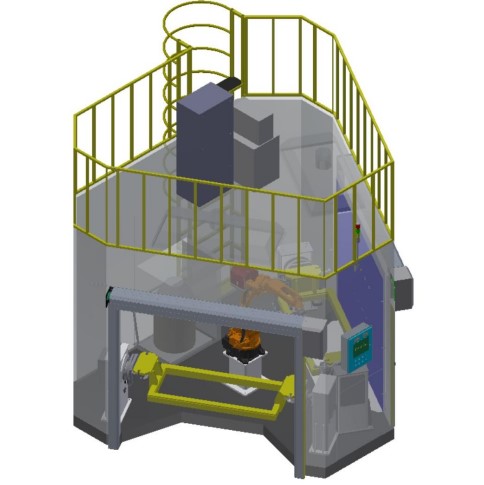
01 การกำหนดค่าโต๊ะทำงานแบบคงที่
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| โครงรอกลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| ติดหุ่นยนต์ | 1 ชุด | ||
| แพลตฟอร์มอุปกรณ์การทำงาน | 3 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ | |
| กล่องปุ่มเวิร์กสเตชัน | 3 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| หน้าจอเวิร์กสเตชัน | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| การติดตามรอยตะเข็บด้วยเลเซอร์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |

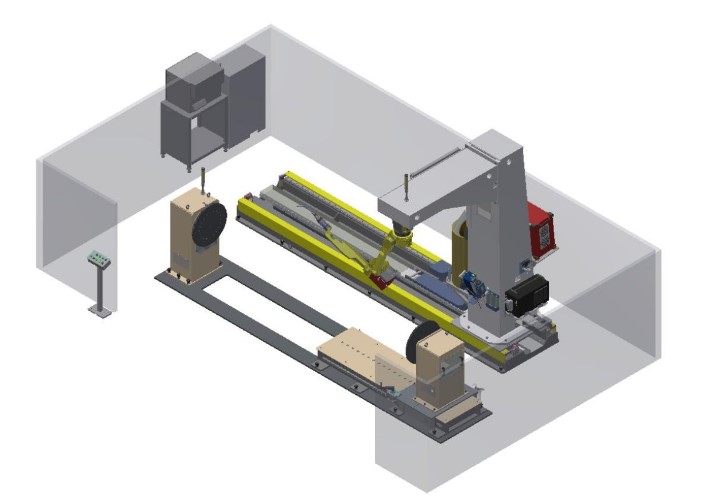
02 การกำหนดค่าตัวกำหนดตำแหน่งพลิกแกนเดียว
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| โครงรอกลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| ติดหุ่นยนต์ | 1 ชุด | ||
| ตัวกำหนดตำแหน่งหัวและส่วนท้ายแกนเดียว | รับน้ำหนักได้ 300กก | 2 ชุดหรือ 1 ชุด | กรอบพลิก: 1.8 ม. * 0.8 ม |
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุดหรือ 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| การติดตามรอยตะเข็บด้วยเลเซอร์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
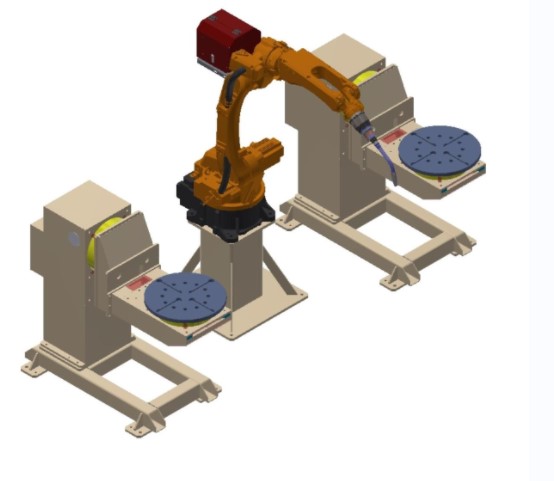
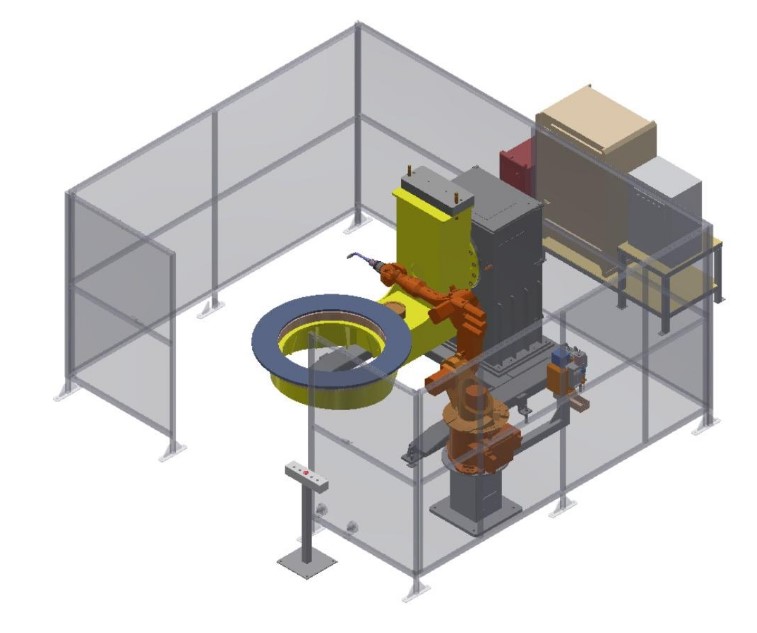
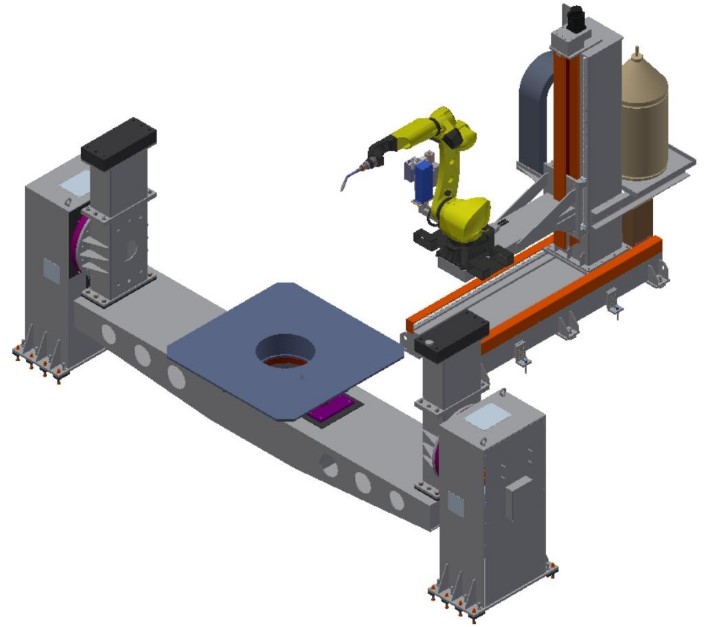
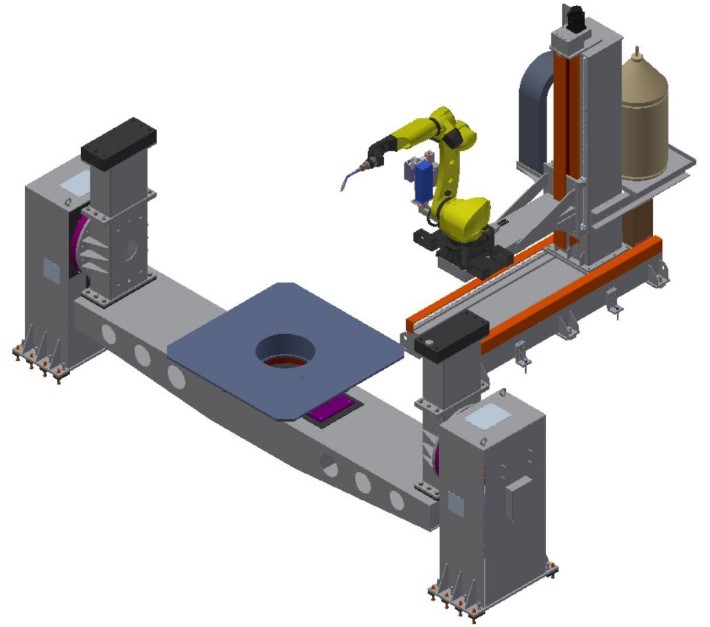
03 การกำหนดค่าเครื่องเล่นแผ่นเสียงแนวนอนแกนเดียว
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| โครงรอกลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| ติดหุ่นยนต์ | 1 ชุด | ||
| โต๊ะหมุนแนวนอนแกนเดี่ยว | รับน้ำหนักได้ 500กก | 1 ชุด | การกำหนดค่า A: โต๊ะทำงานทรงสี่เหลี่ยมขนาด 1.4 ม.*1.1 ม รูปแบบ B: แผ่นปิดหน้าแบบกลม ∅1.5 ม |
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุดหรือ 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| การติดตามรอยตะเข็บด้วยเลเซอร์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
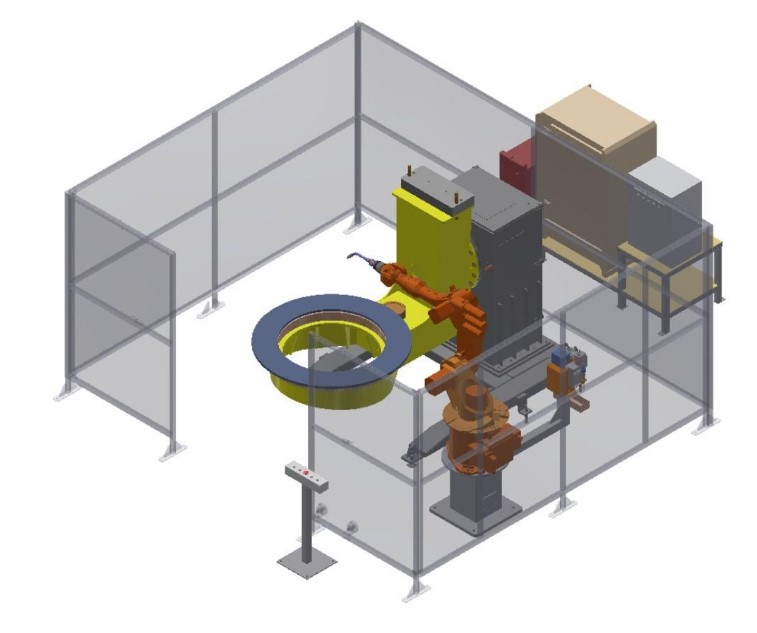
04 การกำหนดค่าตัวกำหนดตำแหน่งสองแกน
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| โครงรอกลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| ติดหุ่นยนต์ | 1 ชุด | ||
| ตัวกำหนดตำแหน่งชนิด L สองแกน | รับน้ำหนักได้ 300กก | 2 ชุดหรือ 1 ชุด | จานดอกไม้ทรงกลม ∅0.5 ม |
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุดหรือ 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| หน้าจอเวิร์กสเตชัน | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| การติดตามรอยตะเข็บด้วยเลเซอร์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
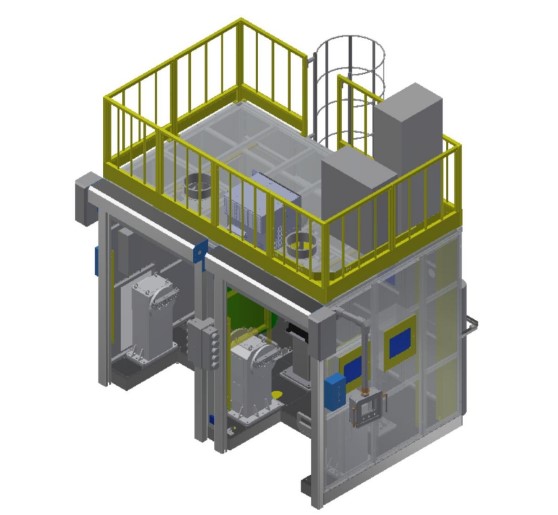
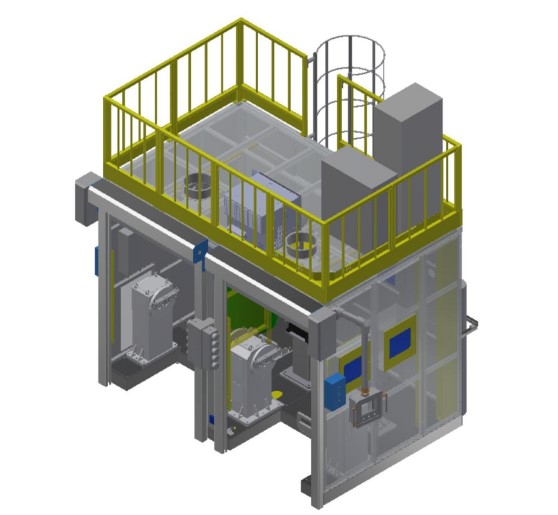
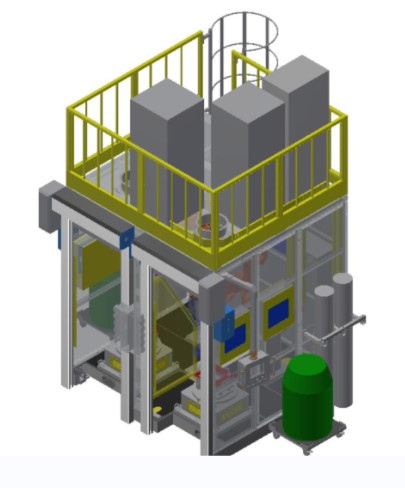
01-1 เวิร์คสเตชั่นหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบา-การกำหนดค่ามาตรฐานประเภท A
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1 ชุด | ||
| ตัวกำหนดตำแหน่งพลิกแกนเดียว | รับน้ำหนักได้: 500กก ขนาดอุปกรณ์ที่ใช้บังคับ: 1.8 ม. (ความยาว) * 0.8 ม. (กว้าง) | 2 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| ฐานติดตั้งสาธารณะ | 1 ชุด | ||
| ห้องเชื่อมปิดสนิท | 1 ชุด | กล่องควบคุมหลักกำลังไฟฟ้าเข้า, กล่องควบคุมอากาศ, ไฟภายในห้อง, ประตูม้วนไฟฟ้า, อินเทอร์เฟซการติดตั้งอุปกรณ์กำจัดฝุ่น, บันไดบำรุงรักษาและรั้วทางอากาศ |
01-2 เวิร์คสเตชั่นหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบา-การกำหนดค่ามาตรฐานประเภท A
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | ||
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของเครื่องจักรและมนุษย์ | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัส Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับความดันอากาศอัดแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
02-1 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชันประเภท B
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 1.4 ม | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1 ชุด | ||
| ตัวกำหนดตำแหน่งพลิกแกนเดียว | รับน้ำหนักได้: 500กก ขนาดอุปกรณ์ที่ใช้บังคับ: 0.8 ม. (ยาว) * 0.5 ม. (กว้าง) | 2 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| ฐานติดตั้งสาธารณะ | 1 ชุด | ||
| ห้องเชื่อมปิดสนิท | 1 ชุด | กล่องควบคุมหลักกำลังไฟฟ้าเข้า, กล่องควบคุมอากาศ, ไฟภายในห้อง, ประตูม้วนไฟฟ้า, อินเทอร์เฟซการติดตั้งอุปกรณ์กำจัดฝุ่น, บันไดบำรุงรักษาและรั้วทางอากาศ |
02-2 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชันประเภท B
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | ||
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุดส | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
ชุดควบคุมหลักไฟฟ้าและเครื่องจักรของมนุษย์ แผงควบคุมการทำงาน | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
การตรวจจับออนไลน์ของ ความดันอากาศอัด | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
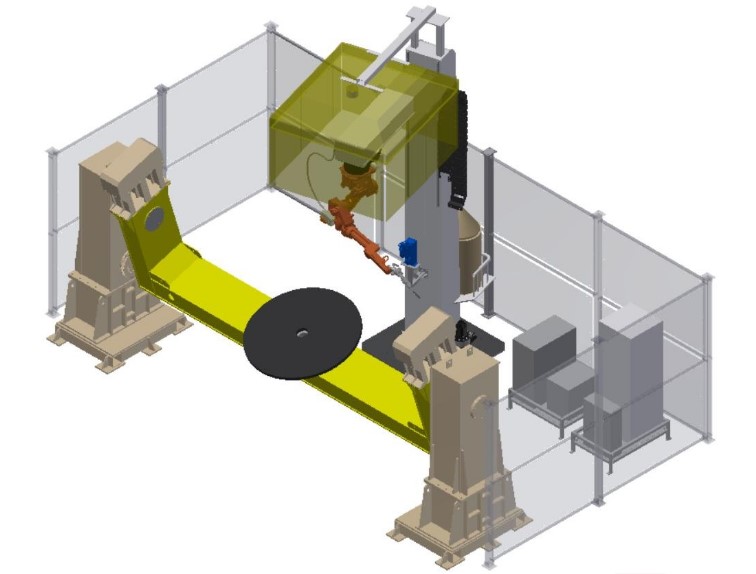
03-1 เวิร์กสเตชันหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบา - การกำหนดค่ามาตรฐาน Type C
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 1.4 ม | 1/2 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1/2 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1/2 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1/2 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1/2 ชุด | ||
| โต๊ะหมุนแนวนอนแกนเดี่ยว | รับน้ำหนักได้: 500กก เส้นผ่านศูนย์กลางการหมุนที่ใช้บังคับ: ≤1m ความสูงที่ใช้บังคับ: ≤0.5m | 2 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| ฐานติดตั้งสาธารณะ | 1 ชุด |
03-2 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชันประเภท C
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ห้องเชื่อมปิดสนิท | 1 ชุด | กล่องควบคุมหลักกำลังไฟฟ้าเข้า, กล่องควบคุมอากาศ, ไฟภายในห้อง, ประตูม้วนไฟฟ้า, อินเทอร์เฟซการติดตั้งอุปกรณ์กำจัดฝุ่น, บันไดบำรุงรักษาและรั้วทางอากาศ | |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | ||
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
ชุดควบคุมหลักไฟฟ้าและเครื่องจักรของมนุษย์ แผงควบคุมการทำงาน | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
การตรวจจับออนไลน์ของ ความดันอากาศอัด | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
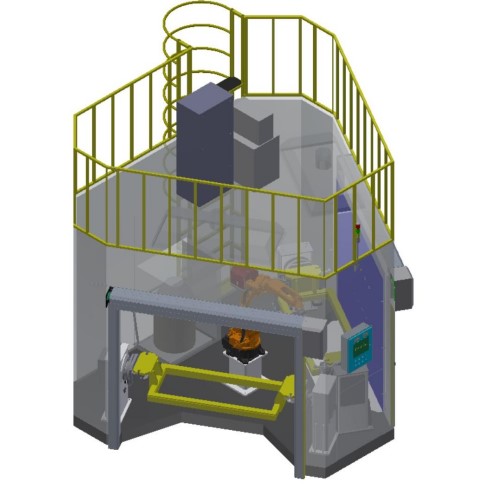
04-1 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชันประเภท D
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | รุ่น ข้อกำหนด | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขนได้ 1.4 ม. และ 2 ม | 1/2 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1/2 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1/2 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1/2 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1/2 ชุด | ||
| ตัวกำหนดตำแหน่งสามแกนพลิกแนวตั้ง | โหลดเพลาพลิก: 500Kg ขนาดฟิกซ์เจอร์ที่ใช้บังคับสำหรับแกนพลิก: 2.4 ม. (ยาว) * 0.8 ม. (กว้าง) | 1 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| ฐานติดตั้งสาธารณะ | 1 ชุด | ||
| ห้องเชื่อมปิดสนิท | 1 ชุด | กล่องควบคุมหลักกำลังไฟฟ้าเข้า, กล่องควบคุมอากาศ, ไฟภายในห้อง, ประตูม้วนไฟฟ้า, อินเทอร์เฟซการติดตั้งอุปกรณ์กำจัดฝุ่น, บันไดบำรุงรักษาและรั้วทางอากาศ |
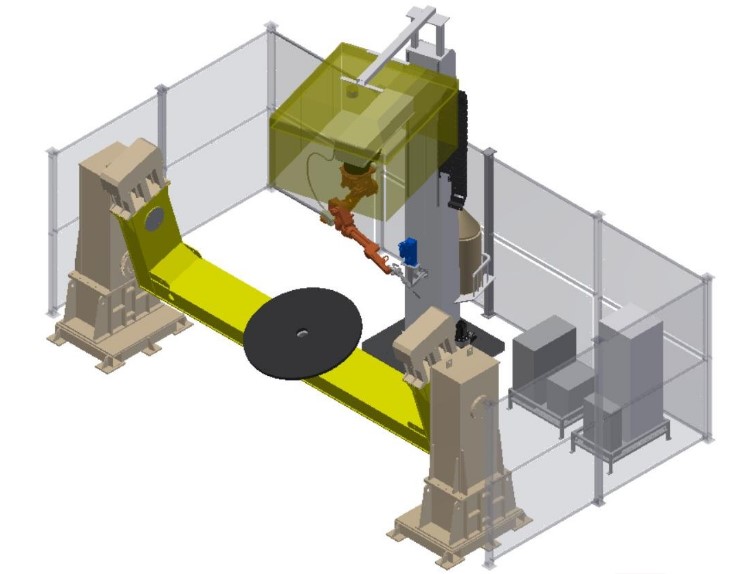
05-1 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชั่น E
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขนได้ 1.4 ม. และ 2 ม | 1/2 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1/2 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1/2 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1/2 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1/2 ชุด | ||
| ตัวกำหนดตำแหน่งสามแกนหมุนในแนวนอน | โหลดเพลาพลิก: 500Kg ขนาดฟิกซ์เจอร์ที่ใช้บังคับสำหรับแกนพลิก: 2.2 ม. (ยาว) * 1 ม. (กว้าง) | 1 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| ฐานติดตั้งสาธารณะ | 1 ชุด | ||
| ห้องเชื่อมปิดสนิท | 1 ชุด | กล่องควบคุมหลักกำลังไฟฟ้าเข้า, กล่องควบคุมอากาศ, ไฟภายในห้อง, ประตูม้วนไฟฟ้า, อินเทอร์เฟซการติดตั้งอุปกรณ์กำจัดฝุ่น, บันไดบำรุงรักษาและรั้วทางอากาศ |
05-2 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชั่น E
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | ||
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
ชุดควบคุมหลักไฟฟ้าและเครื่องจักรของมนุษย์ แผงควบคุมการทำงาน | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
การตรวจจับออนไลน์ของ ความดันอากาศอัด | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
06-1 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชันประเภท F
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขนได้ 1.4 ม. และ 2 ม | 2 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 2 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 2 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 2 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 2 ชุด | ||
| ตัวกำหนดตำแหน่งแกนเดี่ยวแบบหัวและหาง | โหลดเพลาพลิก: 500Kg เส้นผ่านศูนย์กลางการหมุนที่ใช้บังคับ: ≤1m ความยาวที่ใช้บังคับ: ≤2m | 2 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ เบาะนั่งศีรษะและท้ายพร้อมฟังก์ชั่นเดินหน้าและถอยหลังอัตโนมัติและปรับความยาวได้ |
| ฐานติดตั้งสาธารณะ | 1 ชุด | ||
| ห้องเชื่อมปิดสนิท | 1 ชุด | กล่องควบคุมหลักกำลังไฟฟ้าเข้า, กล่องควบคุมอากาศ, ไฟภายในห้อง, ประตูม้วนไฟฟ้า, อินเทอร์เฟซการติดตั้งอุปกรณ์กำจัดฝุ่น, บันไดบำรุงรักษาและรั้วทางอากาศ |
06-2 การกำหนดค่ามาตรฐานหุ่นยนต์เชื่อมชิ้นส่วนน้ำหนักเบาเวิร์กสเตชันประเภท F
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| หน้าจอเวิร์กสเตชัน | 1 ชุด | ||
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
ชุดควบคุมหลักไฟฟ้าและเครื่องจักรของมนุษย์ แผงควบคุมการทำงาน | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
การตรวจจับออนไลน์ของ ความดันอากาศอัด | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
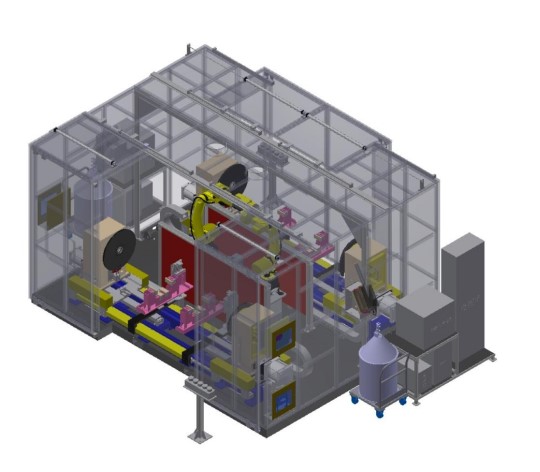
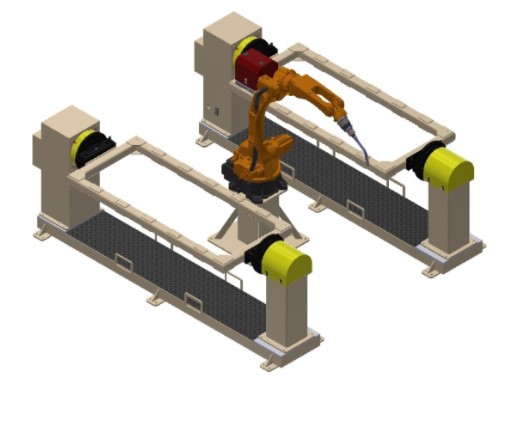
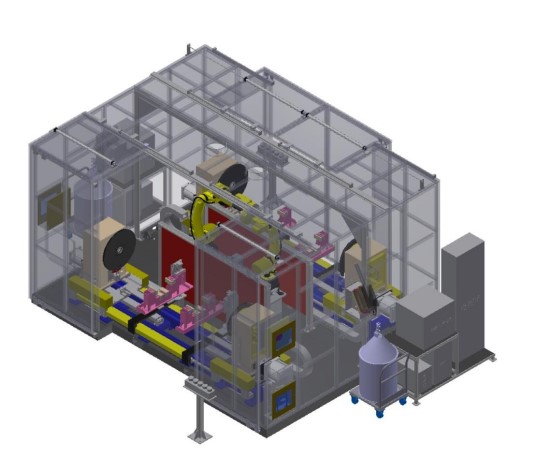
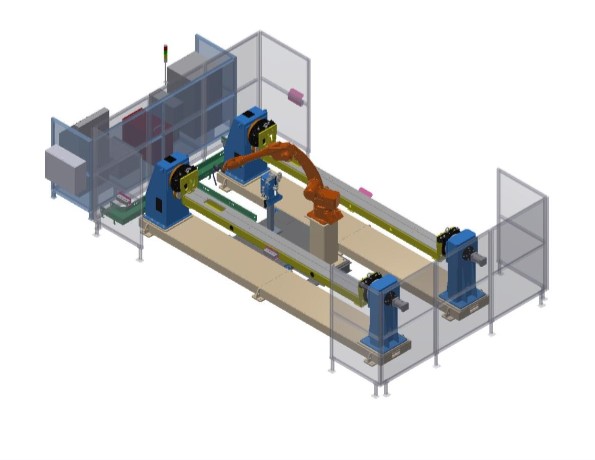
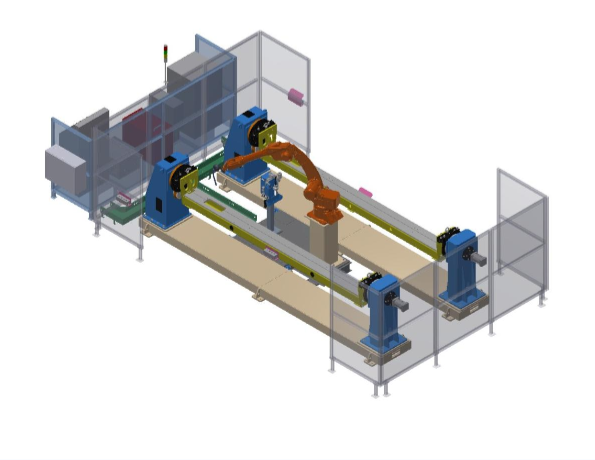
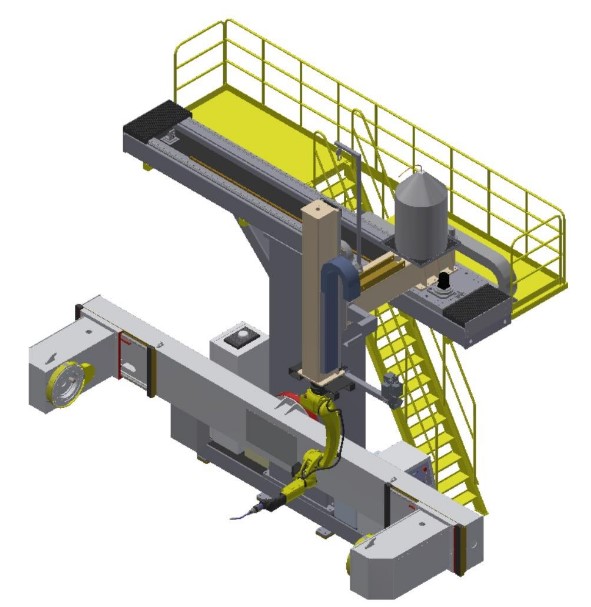
01-1 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท A
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 2 ม | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์ติดตามภาระหนัก | ระยะชักที่มีประสิทธิภาพ: 5 ม | 1 ชุด | ด้วยฐานติดตั้งหุ่นยนต์, ขายึดตู้ควบคุม, ขายึดเครื่องเชื่อมและถังเก็บน้ำ, ขายึดถังลวด, แท่นยึดน้ำยาทำความสะอาดปืน |
| ตัวกำหนดตำแหน่งหัวและส่วนท้ายแกนเดียว | โหลด: 1-3T ไม่จำเป็น ขนาดอุปกรณ์ที่ใช้บังคับ: 6 ม. (ยาว) * 1.5 ม. (กว้าง) | 2 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| รั้วรักษาความปลอดภัยแบบกึ่งปิด | 1 ชุด | พร้อมกล่องควบคุมแอร์ | |
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ |
01-2 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท A
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
ชุดควบคุมหลักไฟฟ้าและเครื่องจักรของมนุษย์ แผงควบคุมการทำงาน | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
การตรวจจับออนไลน์ของ ความดันอากาศอัด | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัส การติดตามส่วนโค้ง หลายชั้นและหลายช่อง | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
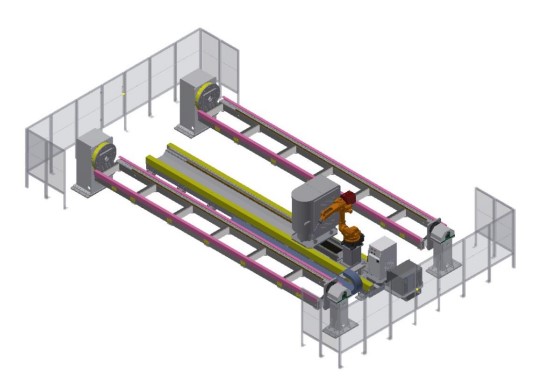
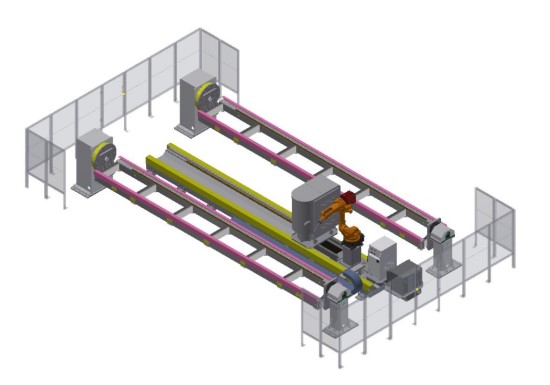
02-1 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์กสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท B
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า ข้อมูลจำเพาะของรุ่น
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 2 ม | 1 ชุด | |
| ระบบเชื่อมและป้อนลวดแบบดิจิตอลเต็มรูปแบบ | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | ระยะชักที่มีประสิทธิภาพ: 5 ม | 1 ชุด | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1 ชุด | ||
| ตัวกำหนดตำแหน่งหัวและส่วนท้ายแกนเดียว | โหลด: 1-3T ไม่จำเป็น ขนาดอุปกรณ์ที่ใช้บังคับ: 3 ม. (ยาว) * 1.5 ม. (กว้าง) | 2 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ Tailstock พร้อมคำเตือนแบบนิวแมติก |
| ฐานติดตั้งสาธารณะ | 1 ชุด | ||
| รั้วรักษาความปลอดภัยแบบกึ่งปิด | 1 ชุด | พร้อมตู้ควบคุมและเครื่องเชื่อม ถังเก็บน้ำ ชั้นวางส่วนกลาง กล่องควบคุมแอร์ | |
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ |
02-2 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์กสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท B
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
ชุดควบคุมหลักไฟฟ้าและเครื่องจักรของมนุษย์ แผงควบคุมการทำงาน | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
| ตะแกรงความปลอดภัย | 2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
การตรวจจับออนไลน์ของ ความดันอากาศอัด | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัส การติดตามส่วนโค้ง หลายชั้นและหลายช่อง | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
03-1 เวิร์คสเตชั่นหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก–การกำหนดค่ามาตรฐานประเภท C
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | วงแขน 1.4 ม., 2 ม | 1 ชุด | |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์ติดตามภาระหนัก | ระยะชักที่มีประสิทธิภาพ: 4 ม | 1 ชุด | |
| หุ่นยนต์กลับหัว C-frame | 1 ชุด | พร้อมเครื่องเชื่อมและขายึดถังเก็บน้ำ, ขายึดกระบอกลวด, ขายึดทำความสะอาดปืน | |
| ตัวกำหนดตำแหน่งหัวและส่วนท้ายแกนเดียว | โหลด: 1-3T ไม่จำเป็น ขนาดอุปกรณ์ที่ใช้บังคับ: 4 ม. (ยาว) * 1 ม. (กว้าง) | 1 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ สามารถปรับส่วนท้ายได้ด้วยตนเองตามทิศทางความยาว โดยมีระยะชักในการปรับ 1.5 ม. |
04-1 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์กสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท D
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | วงแขน 1.4 ม., 2 ม | 1 ชุด | |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| รถเข็นถังลวดเชื่อมและท่อป้อนลวดด้านหลัง | 1 ชุด | ||
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดหุ่นยนต์ | 1 ชุด | ||
| ตัวกำหนดตำแหน่งชนิด L สองแกน | โหลด: 1T, 2T เป็นตัวเลือก | 1 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
04-2 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์กสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท D
| รั้วรักษาความปลอดภัยแบบกึ่งปิด | 1 ชุด | มีตู้ควบคุม เครื่องเชื่อม และถังเก็บน้ำส่วนกลาง กล่องควบคุมแอร์ | |
| กล่องปุ่มเวิร์กสเตชัน | 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัส Siemens PLC + |
| ตะแกรงความปลอดภัย | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับแรงดันอากาศอัดแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัสแบบสัมผัส การติดตาม Arc แบบหลายชั้นและหลายช่องสัญญาณ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
05-1 เวิร์คสเตชั่นหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก–การกำหนดค่ามาตรฐานประเภท E
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | วงแขน 1.4 ม., 2 ม | 1/2 ชุด | สามารถเลือกหุ่นยนต์เดี่ยวหรือคู่ได้ |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1/2 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1/2 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1/2 ชุด | |
| หุ่นยนต์ลอยฟ้ารับน้ำหนักมาก | การเดินทางที่มีประสิทธิภาพของแกน X (ซ้ายและขวา): ไม่จำเป็น 2m-30m การเดินทางที่มีประสิทธิภาพของแกน Y (ด้านหน้าและด้านหลัง): เป็นตัวเลือก 1 ม. - 2 ม จังหวะที่มีประสิทธิภาพของแกน Z (ขึ้นและลง): สามารถเลือกได้ 1 ม. - 2 ม | 1 ชุด | สามารถเลือก 1 แกน (X), 2 แกน (Y), 3 แกน (Z) ร่วมกันได้ มีขายึดตู้ควบคุม เครื่องเชื่อมและขายึดถังเก็บน้ำ ขายึดกระบอกลวดเชื่อม ขายึดน้ำยาทำความสะอาดปืน บันไดตรวจสอบ และแท่นตรวจสอบ |
| ตัวกำหนดตำแหน่งหัวและส่วนท้ายแกนเดียว | โหลด: 1-5T ไม่จำเป็น เส้นผ่านศูนย์กลางการหมุนที่ใช้บังคับ: ≤ψ3m | 1/2 ชุด | หัวอินเตอร์เฟซแบบเปลี่ยนแคลมป์ด่วนและส่วนท้ายแบบสงวนไว้สามารถปรับได้ด้วยตนเองตามทิศทางความยาว โดยมีระยะการปรับ 1-2 ม. |
05-2 เวิร์คสเตชั่นหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก–การกำหนดค่ามาตรฐานประเภท E
| รั้วรักษาความปลอดภัยแบบกึ่งปิด | 1 ชุด | พร้อมกล่องควบคุมแอร์ | |
| กล่องปุ่มเวิร์กสเตชัน | 1/2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัส Siemens PLC + |
| ตะแกรงความปลอดภัย | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับแรงดันอากาศอัดแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัสแบบสัมผัส การติดตาม Arc แบบหลายชั้นและหลายช่องสัญญาณ | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1/2 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
06-1 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท F
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | วงแขน 1.4 ม., 2 ม | 1 ชุด | |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์รางลอยบรรทุกหนักรูปตัว T สองแกน | การเดินทางที่มีประสิทธิภาพของแกน X (ซ้ายและขวา): ไม่จำเป็น 3m-4m จังหวะที่มีประสิทธิภาพของแกน Z (ขึ้นและลง): สามารถเลือกได้ 1 ม. - 2 ม | 1 ชุด | พร้อมกล่องควบคุมอากาศ ขายึดตู้ควบคุม เครื่องเชื่อมและขายึดถังเก็บน้ำ ขายึดกระบอกลวด ขายึดน้ำยาทำความสะอาดปืน บันไดตรวจสอบ และแท่นตรวจสอบ |
| ตัวกำหนดตำแหน่งหัวและส่วนท้ายแบบแกนเดียว (ติดตั้งด้านข้าง) | โหลด: 1-3T ไม่จำเป็น เส้นผ่านศูนย์กลางการหมุนที่ใช้บังคับ: ≤ψ1.8m | 1 ชุด | หัวอินเตอร์เฟซแบบเปลี่ยนด่วนแบบแคลมป์สำรองและส่วนท้ายสามารถปรับได้ด้วยตนเองตามทิศทางความยาว โดยมีระยะชักในการปรับ 0.5 ม. |
06-2 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท F
| กล่องปุ่มเวิร์กสเตชัน | 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัส Siemens PLC + |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1set | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับแรงดันอากาศอัดแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัสแบบสัมผัส การติดตาม Arc แบบหลายชั้นและหลายช่องสัญญาณ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
07-1 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท G
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์รางภาคพื้นดินสำหรับงานหนักแบบสองแกน | การเดินทางที่มีประสิทธิภาพของแกน X (ซ้ายและขวา): ไม่จำเป็น 1.5 ม จังหวะที่มีประสิทธิภาพของแกน Z (ขึ้นและลง): สามารถเลือกได้ 1.5 ม | 1 ชุด | พร้อมกล่องควบคุมอากาศ ขายึดตู้ควบคุม เครื่องเชื่อมและขายึดถังเก็บน้ำ ขายึดกระบอกลวด ขายึดน้ำยาทำความสะอาดปืน บันไดตรวจสอบ และแท่นตรวจสอบ |
| ตัวกำหนดตำแหน่งสองแกนสองแกน | โหลด: 2-3T ไม่จำเป็น เส้นผ่านศูนย์กลางการหมุนที่ใช้บังคับ: ≤ψ3m | 1 ชุด | หัวอินเตอร์เฟซแบบเปลี่ยนด่วนแบบแคลมป์สำรองและส่วนท้ายสามารถปรับได้ด้วยตนเองตามทิศทางความยาว โดยมีระยะชักในการปรับ 0.5 ม. |
07-2 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท G
| กล่องปุ่มเวิร์กสเตชัน | 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัส Siemens PLC + |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1set | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับแรงดันอากาศอัดแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัสแบบสัมผัส การติดตาม Arc แบบหลายชั้นและหลายช่องสัญญาณ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
08-1 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท H
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์หมุนกลับหัว C-frame | ระยะชักที่มีประสิทธิภาพของแกน Z (ขึ้นและลง): 1-2 ม มุมการหมุน: ±90° | 1 ชุด | พร้อมขายึดกระบอกลวด, ขายึดทำความสะอาดปืน และบันไดตรวจสอบ |
| ตัวกำหนดตำแหน่งสองแกนสองแกน | โหลด: 3-10T ไม่จำเป็น เส้นผ่านศูนย์กลางการหมุนที่ใช้บังคับ: ≤ψ3m | 1 ชุด | หัวอินเตอร์เฟซแบบเปลี่ยนด่วนแบบแคลมป์สำรองและส่วนท้ายสามารถปรับได้ด้วยตนเองตามทิศทางความยาว โดยมีระยะชักในการปรับ 0.5 ม. |
08-2 เวิร์กสเตชันหุ่นยนต์เชื่อมอาร์คสำหรับงานหนัก - การกำหนดค่ามาตรฐานประเภท H
| รั้วรักษาความปลอดภัยแบบกึ่งปิด | 1 ชุด | ชั้นเก็บของแบบรวมศูนย์พร้อมกล่องควบคุมอากาศ ตู้ควบคุม เครื่องเชื่อม และถังเก็บน้ำ | |
| กล่องปุ่มเวิร์กสเตชัน | 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | PLC + การควบคุมหลักของหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัส Siemens PLC + |
| การตรวจจับการมีลวดเชื่อมอยู่ทางออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับแรงดันอากาศอัดแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| การตรวจจับการไหลของก๊าซป้องกันการเชื่อมแบบออนไลน์ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัสแบบสัมผัส การติดตาม Arc แบบหลายชั้นและหลายช่องสัญญาณ | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | สามารถเลือกหรือไม่เลือกก็ได้ |
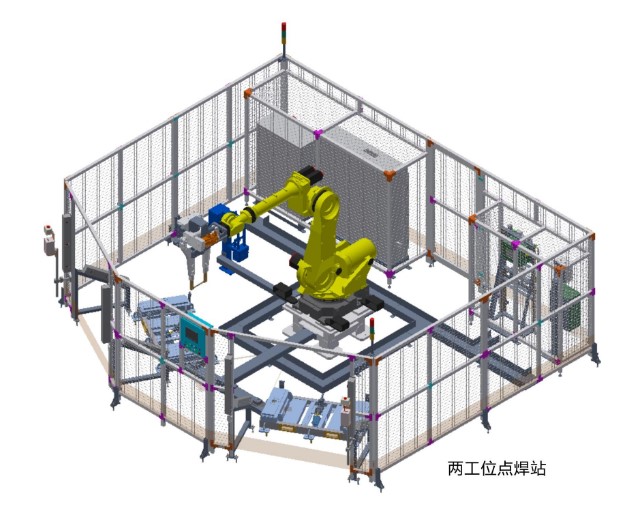
01-1 เวิร์กสเตชันหุ่นยนต์เชื่อมจุดต้านทาน - การกำหนดค่ามาตรฐาน
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 2.7 ม./น้ำหนัก 210 กก | 1 ชุด | พร้อมแพ็คเกจซอฟต์แวร์การเชื่อมจุด |
| ระบบแคลมป์เชื่อมหุ่นยนต์เซอร์โว | ประเภท C และประเภท X เป็นตัวเลือก | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน |
| แพ็คเกจสายแบบยืดหยุ่น | 1 ชุด | ||
| หน่วยผสมน้ำและก๊าซ | 1 ชุด | ||
| เครื่องเจียรอัตโนมัติ | 1 ชุด | ||
| ติดหุ่นยนต์ | 1 ชุด | แท่นยึดหุ่นยนต์สำหรับงานหนัก | |
| อินเตอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วหนีบ | นิวเมติก | 2/3 ชุด | อินเทอร์เฟซการเปลี่ยนแปลงอย่างรวดเร็วของแคลมป์ที่สงวนไว้ |
| รั้วรักษาความปลอดภัยแบบกึ่งปิด | 1 ชุด | พร้อมตู้ควบคุมและถังเก็บน้ำแบบรวมศูนย์ | |
| ตะแกรงความปลอดภัย | 2/3 ชุด | ||
| กล่องปุ่มเวิร์กสเตชัน | 2/3 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ | |
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: Siemens PLC + หน้าจอสัมผัส | |
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | ไม่จำเป็น |
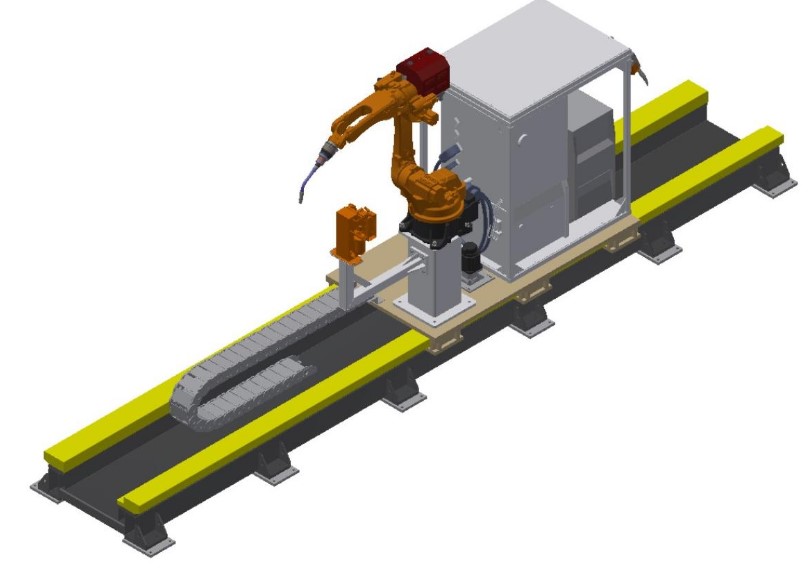
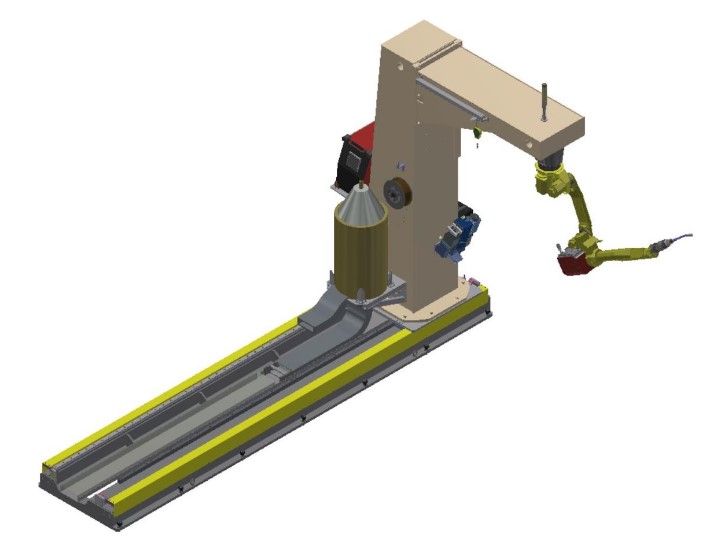
01-2 ระบบหุ่นยนต์เชื่อมอย่างเป็นทางการชนิดรางกราวด์ – โครงร่างมาตรฐาน
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า, การตัดไฟ
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | สามารถเลือกช่วงแขน 1.4 ม. และ 2 ม. ได้ | 1 ชุด | สามารถเลือกหุ่นยนต์หลายตัวได้ |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| ติดตามหุ่นยนต์ | จังหวะที่มีประสิทธิภาพ: สามารถเลือกได้ 2-30 ม โหลดพิกัด: 1T ความเร็วในการทำงาน: 0-15 ม./นาที ทำซ้ำความแม่นยำของตำแหน่ง: ± 0.15 มม | 1 ชุด | มีฐานติดตั้งหุ่นยนต์ ตู้ควบคุม และแท่นยึดเครื่องเชื่อม แท่นยึดกระบอกลวด แท่นทำความสะอาดปืน |
| แกนภายนอกของหุ่นยนต์ | 1 ชุด | ด้วยสายเคเบิลแบบยืดหยุ่นที่ขยายได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | ติดตามการติดต่อ การติดตามส่วนโค้ง หลายชั้นและหลายช่อง | 1 ชุด | ไม่จำเป็น |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | ไม่จำเป็น |
02 ระบบหุ่นยนต์เชื่อมกลับหัวแบบรางกราวด์–การกำหนดค่ามาตรฐาน
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมแบบป้องกันแก๊ส, การเชื่อมอาร์กซีนอน, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า, การตัดไฟ
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 1.4 ม. และ 2 ม | 1 ชุด | สามารถเลือกหุ่นยนต์หลายตัวได้ |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์ติดตามภาระหนัก | จังหวะที่มีประสิทธิภาพ: 2-30 ม. โหลดพิกัด: 3.5T ความเร็วในการทำงาน: 0-15 ม./นาที ทำซ้ำความแม่นยำของตำแหน่ง: ± 0.15 มม | 1 ชุด | |
| หุ่นยนต์กลับหัว C-frame | 1 ชุด | ||
| แกนภายนอกของหุ่นยนต์ | 1 ชุด | ด้วยสายเคเบิลแบบยืดหยุ่นที่ขยายได้ | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | ติดตามการติดต่อ การติดตามส่วนโค้ง หลายชั้นและหลายช่อง | 1 ชุด | ไม่จำเป็น |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | ไม่จำเป็น |
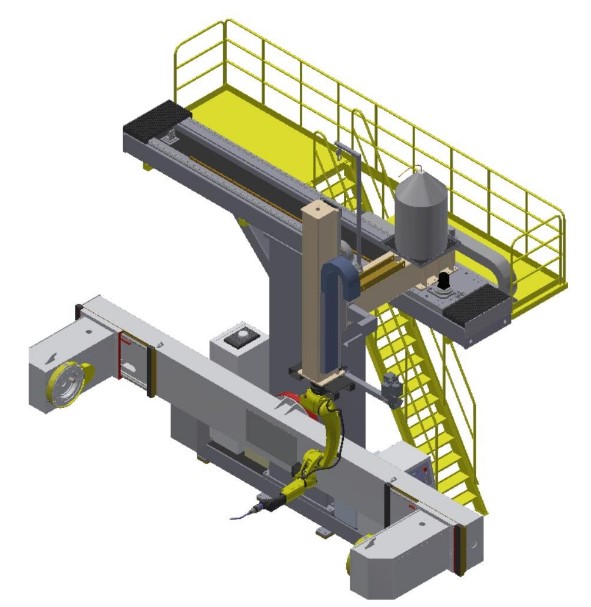
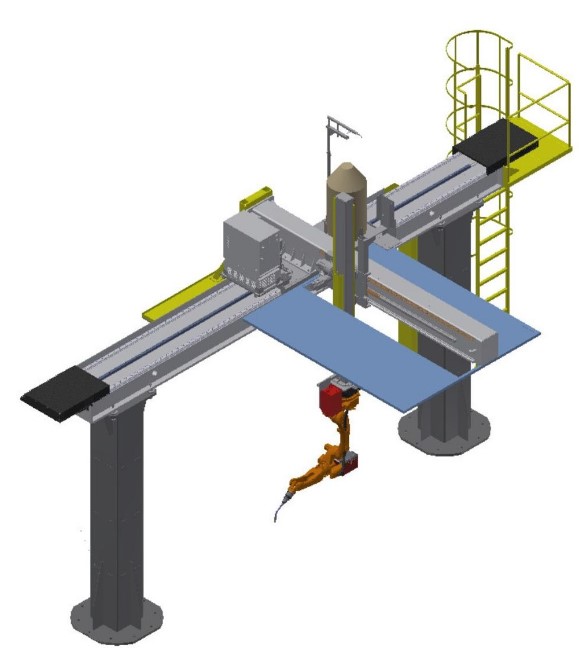
03 ระบบหุ่นยนต์เชื่อมแบบกลับหัวแบบรางลอย–การกำหนดค่ามาตรฐาน
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า, การตัดไฟ
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 1.4 ม. และ 2 ม | 1 ชุด | สามารถเลือกหุ่นยนต์หลายตัวได้ |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์ลอยฟ้า | การเดินทางที่มีประสิทธิภาพของแกน X (ซ้ายและขวา): ไม่จำเป็น 2m-30m การเดินทางที่มีประสิทธิภาพของแกน Y (ด้านหน้าและด้านหลัง): เป็นตัวเลือก 1 ม. - 2 ม จังหวะที่มีประสิทธิภาพของแกน Z (ขึ้นและลง): สามารถเลือกได้ 1 ม. - 2 ม โหลดพิกัด: 0.4T ความเร็วในการทำงานของแต่ละแกน: 0-15 ม./นาที ทำซ้ำความแม่นยำของตำแหน่งของแต่ละแกน: ± 0.15 มม | 1 ชุด | สามารถเลือก 1 แกน (X), 2 แกน (Y), 3 แกน (Z) ร่วมกันได้ มีตู้ควบคุมและแท่นยึดเครื่องเชื่อม แท่นยึดกระบอกลวด แท่นทำความสะอาดปืน บันไดตรวจสอบ และแท่นตรวจสอบ |
| แกนภายนอกของหุ่นยนต์ | 3 ชุด | ด้วยสายเคเบิลแบบยืดหยุ่นที่ขยายได้ | |
| เครื่องดูดควันเพดานเก็บฝุ่น | 1 ชุด | ไม่จำเป็น | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัส การติดตามส่วนโค้ง หลายชั้นและหลายช่อง | 1 ชุด | ไม่จำเป็น |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | ไม่จำเป็น |
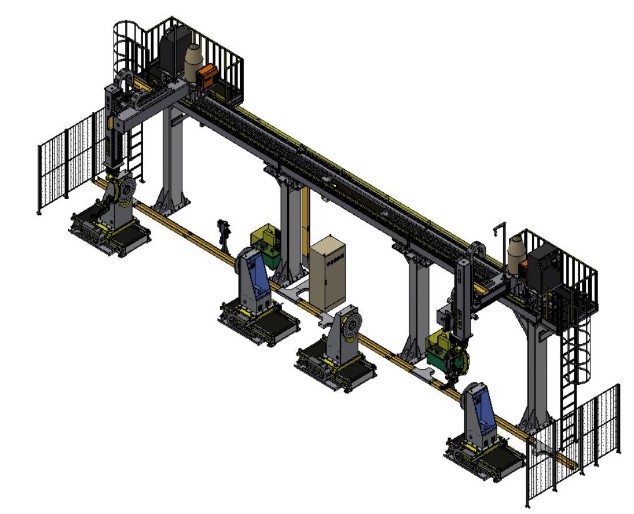
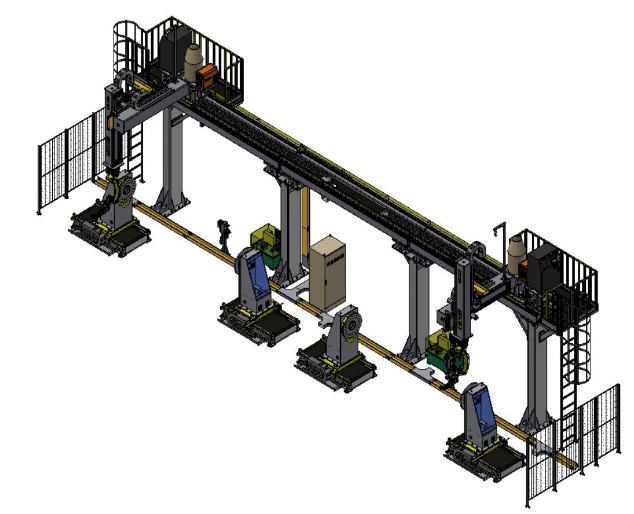
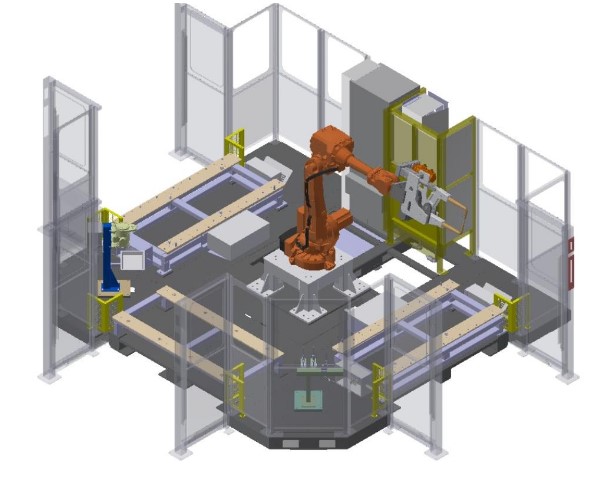
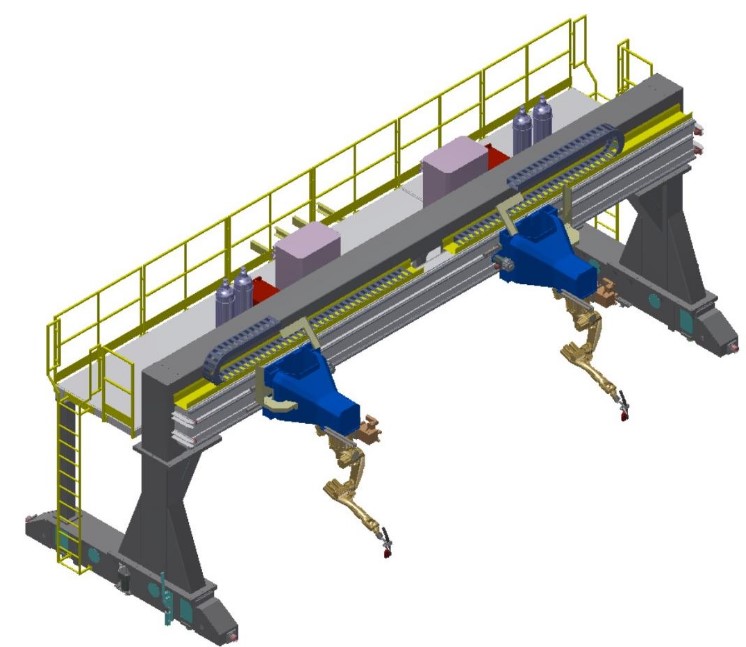
04 ระบบหุ่นยนต์เชื่อมแบบกลับหัวแบบโครงสำหรับตั้งสิ่งของ – การกำหนดค่ามาตรฐาน
กระบวนการเชื่อมที่ใช้บังคับ: การเชื่อมป้องกันแก๊ส, การเชื่อมอาร์กอนอาร์ก, การเชื่อมด้วยเลเซอร์, การตัดด้วยเลเซอร์, การตัดพลาสม่า, การตัดไฟ
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 1.4 ม. และ 2 ม | 1 ชุด | สามารถเลือกหุ่นยนต์หลายตัวได้ |
| เครื่องเชื่อมดิจิตอลและระบบป้อนลวด | 1 ชุด | ตามวัสดุของวัตถุการเชื่อม จับคู่รุ่นที่มีประสิทธิภาพการเชื่อมที่แตกต่างกัน | |
| ปืนเชื่อมอัตโนมัติป้องกันการชนกันของหุ่นยนต์ | 1 ชุด | ตามรูปแบบของเครื่องเชื่อม การจับคู่ปืนเชื่อมกับประสิทธิภาพของกระบวนการที่แตกต่างกัน | |
| เครื่องทำความสะอาดปืนอัตโนมัติ | ทำความสะอาดปืน ตัดลวด ฉีดน้ำมันซิลิโคน | 1 ชุด | |
| หุ่นยนต์ลอยฟ้า | ช่วงโครงสำหรับตั้งสิ่งของ: <10m ไม่จำเป็น ระยะชักที่มีประสิทธิภาพของแกน X (ซ้ายและขวา): สามารถเลือกได้ ≤9m การเดินทางที่มีประสิทธิภาพของแกน Y (ด้านหน้าและด้านหลัง): สามารถเลือกได้ ≤100m จังหวะที่มีประสิทธิภาพของแกน Z (ขึ้นและลง): สามารถเลือกได้ 1 ม. - 2 ม พิกัดความสามารถในการรับน้ำหนัก: 0.4T (หุ่นยนต์ตัวเดียว) ความเร็วในการทำงานของแต่ละแกน: 0-15 ม./นาที ทำซ้ำความแม่นยำของตำแหน่งของแต่ละแกน: ± 0.15 มม ข้อมูลจำเพาะของแทร็กแกน Y (ด้านหน้าและด้านหลัง): การเจียรที่แม่นยำของรางหนัก P43 การประมวลผล + พื้นฐานการติดตั้ง (จัดทำโดยผู้ใช้) | 1 ชุด | สามารถเลือก 1 แกน (X), 2 แกน (Y), 3 แกน (Z) ร่วมกันได้ มีตู้ควบคุมและแท่นยึดเครื่องเชื่อม แท่นยึดกระบอกลวด แท่นทำความสะอาดปืน บันไดตรวจสอบ และแท่นตรวจสอบ |
| แกนภายนอกของหุ่นยนต์ | 4 ชุด | ด้วยสายเคเบิลแบบยืดหยุ่นที่ขยายได้ โหมดไดรฟ์คู่ซิงโครนัสแกน Y | |
| ซอฟต์แวร์การเชื่อมอาร์คเพลทขนาดกลางและหนา | การตรวจจับการสัมผัส การติดตามส่วนโค้ง หลายชั้นและหลายช่อง | 1 ชุด | ไม่จำเป็น |
| เลเซอร์ติดตามตะเข็บเชื่อม (การวางตำแหน่ง) | 1 ชุด | ไม่จำเป็น |
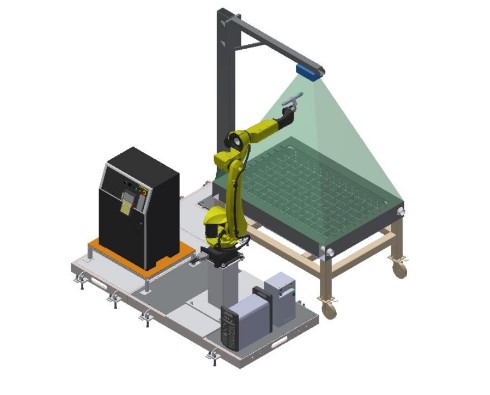
01.การกำหนดค่ามาตรฐานของเวิร์คสเตชั่นการตัดพลาสม่าด้วยหุ่นยนต์ไร้การสอน
กระบวนการเชื่อมที่ใช้บังคับ: การตัดพลาสม่า
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ช่วงแขน 1.8 ม./น้ำหนัก 20 กก | 1 ชุด | |
| ระบบเครื่องตัดพลาสม่าแบบกลไกอินเวอร์เตอร์ | 1 ชุด | แบบจำลองที่มีประสิทธิภาพการเชื่อมที่แตกต่างกันตามวัสดุของวัตถุการเชื่อม | |
| ปืนตัดพลาสม่าแบบละเอียดของเครื่องจักร | 1 ชุด | ตามการจับคู่รุ่นเครื่องเชื่อมที่แตกต่างกันสามารถจับคู่ปืนเชื่อมที่มีประสิทธิภาพของกระบวนการที่แตกต่างกันได้ | |
| ชั้นวางปืนพิเศษป้องกันการชนกัน | 1 ชุด | ||
| ระบบกล้องมองภาพ 3 มิติ | 1 ชุด | ด้วยตัวควบคุมและซอฟต์แวร์อิสระ | |
| ติดกล้อง | 1 ชุด | ||
| ติดหุ่นยนต์ | 1Set | ||
| ฐานติดตั้งสาธารณะ | 1 ชุด | พร้อมขายึดตู้ควบคุม เครื่องตัด และขายึดถังเก็บน้ำ | |
| โต๊ะตัด | ช่วงการตัด: 1.5 ม. (ยาว) * 1 ม. (กว้าง) | 1 ชุด | ที่สามารถลอกออกได้ |
| กล่องปุ่มเวิร์กสเตชัน | 1 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ |
02. การกำหนดค่ามาตรฐานเวิร์กสเตชันการตัดเปลวไฟของหุ่นยนต์
กระบวนการเชื่อมที่ใช้บังคับ: การตัดไฟ
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| ระบบร่างกายของหุ่นยนต์ | ปีกกว้าง 2 ม | 1 ชุด | |
| ระบบจำหน่ายก๊าซ | 1 ชุด | ||
| อุปกรณ์คบเพลิงตัดเปลวไฟ | 1 ชุด | ||
| ที่วางคบเพลิงตัดพิเศษป้องกันการชนกัน | 1 ชุด | ||
| อุปกรณ์จุดระเบิดอัตโนมัติ | 1 ชุด | ||
| ติดหุ่นยนต์ | 1 ชุด | ||
| โต๊ะตัด | ช่วงการตัด: 1.5 ม. (ยาว) * 1 ม. (กว้าง) | 2 ชุด | ด้วยการผลักดันการรีไซเคิลขยะแบบเคลื่อนที่ |
| กล่องปุ่มเวิร์กสเตชัน | 2 ชุด | กำหนดการเริ่มและหยุดการดำเนินการ |

03. เครื่องตัดเลเซอร์ CNC มาตรฐาน ระบบตัดกระดาษอัตโนมัติ – การกำหนดค่ามาตรฐาน
กระบวนการเชื่อมที่ใช้บังคับ: การโหลดแผ่นเครื่องตัดเลเซอร์ CNC และขนถ่าย
| Name | ข้อมูลจำเพาะของรุ่น | จำนวน | หมายเหตุ |
| หุ่นยนต์โครงสำหรับตั้งสิ่งของแบบสามแกน | พิกัดสี่เหลี่ยม X, Y, Z โหลด: 200kg |
1 ชุด | |
| อุปกรณ์จับยึด | ความหนาของวัสดุที่ใช้บังคับ: ≤3มม ช่วงแผ่นที่ใช้งานได้: 2.5 ม. (ยาว) * 1.25 ม. (กว้าง) |
1 ชุด | |
| โต๊ะกลางอัตโนมัติ | 1 ชุด | ||
| รั้วรักษาความปลอดภัย | ประเภทรั้วกริด | 1 ชุด | ความยาวรวมประมาณ 17ม |
| ตะแกรงความปลอดภัย | 1 ชุด | ||
| ระบบสุญญากาศ | 1 ชุด | ||
| ระบบอากาศทั่วไป | 1 ชุด | การกำหนดค่า A: Airtac การกำหนดค่า B: SMC |
|
| ชุดควบคุมหลักไฟฟ้าและแผงควบคุมการทำงานของมนุษย์และเครื่องจักร PLC + การควบคุมหลักหน้าจอสัมผัสอุตสาหกรรม | 1 ชุด | การกำหนดค่า A: หน้าจอสัมผัส Mitsubishi PLC + Weilon การกำหนดค่า B: หน้าจอสัมผัสของ Siemens PLC + |
|
| พอร์ตการรวบรวมระบบสารสนเทศ (MES) | 1 ชุด | สามารถเลือกหรือไม่เลือกก็ได้ |
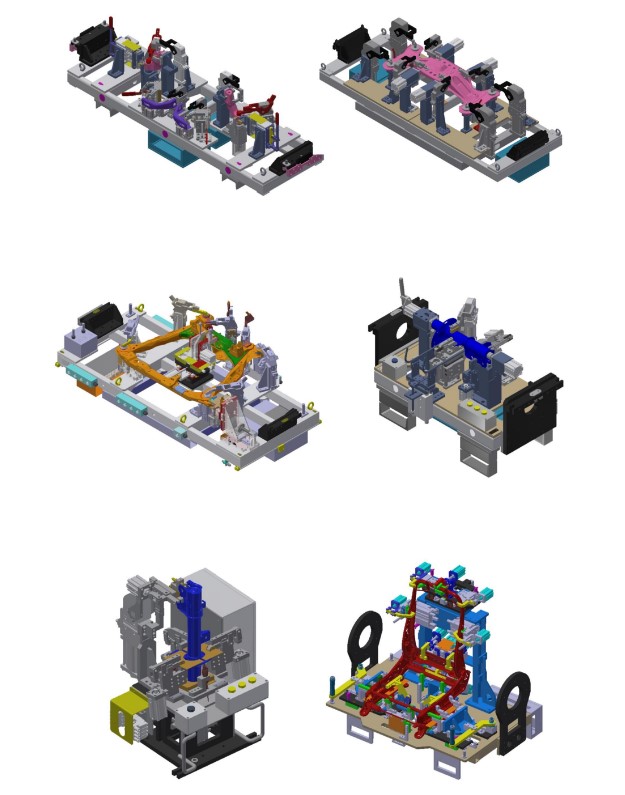
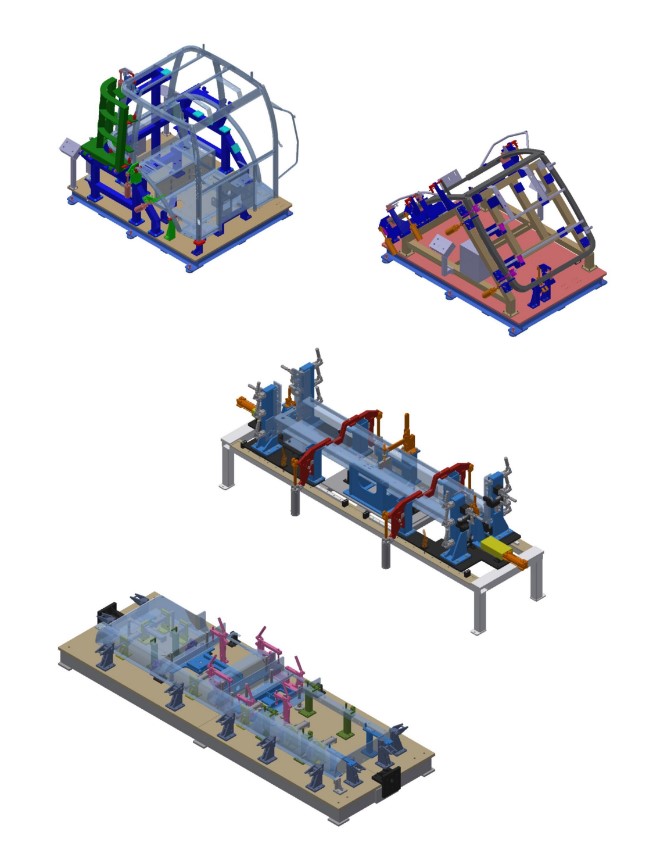
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์จับยึดเครื่องมือทั้งหมดใช้การออกแบบที่เปลี่ยนแปลงอย่างรวดเร็ว โดยมีอินเทอร์เฟซการอัพเดตผลิตภัณฑ์ที่สงวนไว้สำหรับผู้ใช้ โครงกระดูกโครงสร้างมีเหล็กและความแข็งแรงเพียงพอ และชิ้นส่วนที่เชื่อมจะผ่านการบำบัดตามอายุเพื่อขจัดความเครียดภายใน ส่วนประกอบที่เชื่อมแต่ละชิ้นจะถูกจัดตำแหน่งและจับยึดแยกกันเพื่อให้แน่ใจว่าความสัมพันธ์ของตำแหน่งระหว่างส่วนประกอบที่เชื่อมแต่ละชิ้นนั้นค่อนข้างถูกต้อง เพื่อให้ตรงตามข้อกำหนดของการวาดชิ้นงาน
วัสดุหนีบ:
โต๊ะฟิกซ์เจอร์ (ฐาน) แผ่นฐาน ตัวยึด ฯลฯ หมุดและโต๊ะกำหนดตำแหน่งแบบวงกลมสำหรับการวางตำแหน่งชิ้นงาน บล็อกกำหนดตำแหน่ง บล็อกชน แผ่นดันธรรมดา หมุดและปลอกกำหนดตำแหน่งแบบเปลี่ยนด่วน สกรู โบลท์ แผ่นโลหะกระเด็นกลับ ส่วนประกอบนิวเมติก วิธีการตรวจจับ
Q235-A 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 ระดับ 8.8, ระดับ 12.9 ทองเหลือง SMC, FESTO, AirTAC สามพิกัด
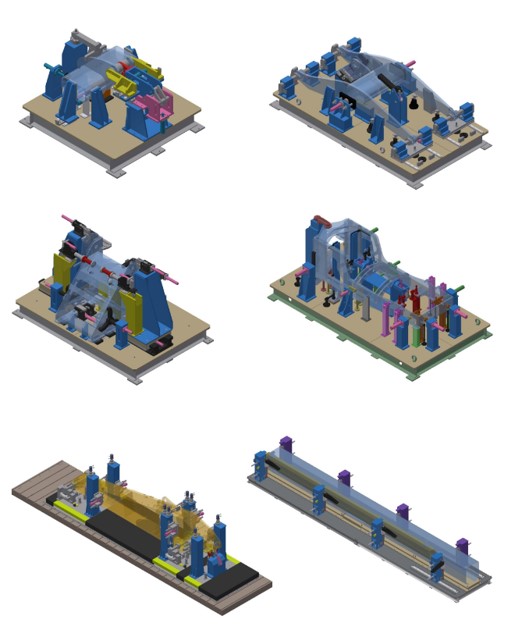
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์เชื่อมสำหรับส่วนประกอบรถยนต์พลังงานใหม่
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์จับยึดเครื่องมือทั้งหมดใช้การออกแบบที่เปลี่ยนแปลงอย่างรวดเร็ว โดยมีอินเทอร์เฟซการอัพเดตผลิตภัณฑ์ที่สงวนไว้สำหรับผู้ใช้ โครงกระดูกโครงสร้างมีเหล็กและความแข็งแรงเพียงพอ และชิ้นส่วนที่เชื่อมจะผ่านการบำบัดตามอายุเพื่อขจัดความเครียดภายใน ส่วนประกอบที่เชื่อมแต่ละชิ้นจะถูกจัดตำแหน่งและจับยึดแยกกันเพื่อให้แน่ใจว่าความสัมพันธ์ของตำแหน่งระหว่างส่วนประกอบที่เชื่อมแต่ละชิ้นนั้นค่อนข้างถูกต้อง เพื่อให้ตรงตามข้อกำหนดของการวาดชิ้นงาน
วัสดุยึด:
โต๊ะฟิกซ์เจอร์ (ฐาน) แผ่นฐาน ตัวยึด ฯลฯ หมุดและโต๊ะกำหนดตำแหน่งแบบวงกลมสำหรับการวางตำแหน่งชิ้นงาน บล็อกกำหนดตำแหน่ง บล็อกชน แผ่นดันธรรมดา หมุดและปลอกกำหนดตำแหน่งแบบเปลี่ยนด่วน สกรู โบลท์ แผ่นโลหะกระเด็นกลับ ส่วนประกอบนิวเมติก วิธีการตรวจจับ
Q235-A 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 ระดับ 8.8, ระดับ 12.9 ทองเหลือง SMC, FESTO, AirTAC สามพิกัด
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
จิ๊กเชื่อมสำหรับชิ้นส่วนรถยนต์เพื่อการพาณิชย์
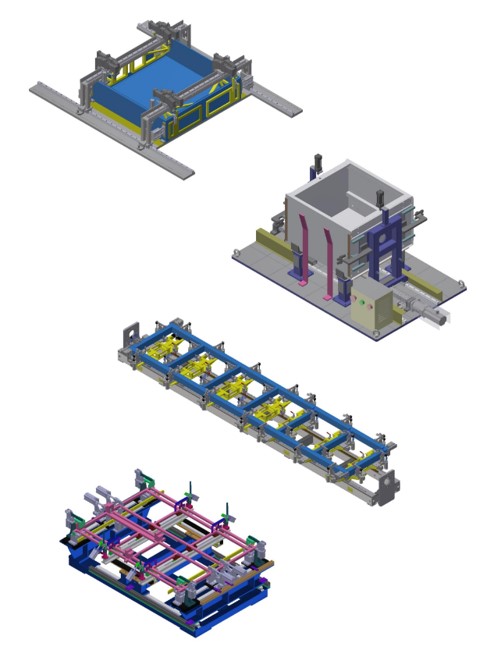
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์จับยึดเครื่องมือทั้งหมดใช้การออกแบบที่เปลี่ยนแปลงอย่างรวดเร็ว โดยมีอินเทอร์เฟซการอัพเดตผลิตภัณฑ์ที่สงวนไว้สำหรับผู้ใช้ โครงกระดูกโครงสร้างมีเหล็กและความแข็งแรงเพียงพอ และชิ้นส่วนที่เชื่อมจะผ่านการบำบัดตามอายุเพื่อขจัดความเครียดภายใน ส่วนประกอบที่เชื่อมแต่ละชิ้นจะถูกจัดตำแหน่งและจับยึดแยกกันเพื่อให้แน่ใจว่าความสัมพันธ์ของตำแหน่งระหว่างส่วนประกอบที่เชื่อมแต่ละชิ้นนั้นค่อนข้างถูกต้อง เพื่อให้ตรงตามข้อกำหนดของการวาดชิ้นงาน
วัสดุหนีบ:
โต๊ะฟิกซ์เจอร์ (ฐาน) แผ่นฐาน ตัวยึด ฯลฯ หมุดและโต๊ะกำหนดตำแหน่งแบบวงกลมสำหรับการวางตำแหน่งชิ้นงาน บล็อกกำหนดตำแหน่ง บล็อกชน แผ่นดันธรรมดา หมุดและปลอกกำหนดตำแหน่งแบบเปลี่ยนด่วน สกรู โบลท์ แผ่นโลหะกระเด็นกลับ ส่วนประกอบนิวเมติก วิธีการตรวจจับ
Q235-A 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 ระดับ 8.8, ระดับ 12.9 ทองเหลือง SMC, FESTO, AirTAC สามพิกัด
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์เชื่อมสำหรับชิ้นส่วนเครื่องจักรก่อสร้าง
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
วัสดุหนีบ:
โต๊ะฟิกซ์เจอร์ (ฐาน) แผ่นฐาน ตัวยึด ฯลฯ หมุดและโต๊ะกำหนดตำแหน่งแบบวงกลมสำหรับการวางตำแหน่งชิ้นงาน บล็อกกำหนดตำแหน่ง บล็อกชน แผ่นดันธรรมดา หมุดและปลอกกำหนดตำแหน่งแบบเปลี่ยนด่วน สกรู โบลท์ แผ่นโลหะกระเด็นกลับ ส่วนประกอบนิวเมติก วิธีการตรวจจับ
Q235-A 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 ระดับ 8.8, ระดับ 12.9 ทองเหลือง SMC, FESTO, AirTAC สามพิกัด
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์เชื่อมโลหะแผ่นและส่วนประกอบ
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
อุปกรณ์จับยึดเครื่องมือทั้งหมดใช้การออกแบบที่เปลี่ยนแปลงอย่างรวดเร็ว โดยมีอินเทอร์เฟซการอัพเดตผลิตภัณฑ์ที่สงวนไว้สำหรับผู้ใช้ โครงกระดูกโครงสร้างมีเหล็กและความแข็งแรงเพียงพอ และชิ้นส่วนที่เชื่อมจะผ่านการบำบัดตามอายุเพื่อขจัดความเครียดภายใน ส่วนประกอบที่เชื่อมแต่ละชิ้นจะถูกจัดตำแหน่งและจับยึดแยกกันเพื่อให้แน่ใจว่าความสัมพันธ์ของตำแหน่งระหว่างส่วนประกอบที่เชื่อมแต่ละชิ้นนั้นค่อนข้างถูกต้อง เพื่อให้ตรงตามข้อกำหนดของการวาดชิ้นงาน
วัสดุหนีบ:
โต๊ะฟิกซ์เจอร์ (ฐาน) แผ่นฐาน ตัวยึด ฯลฯ หมุดและโต๊ะกำหนดตำแหน่งแบบวงกลมสำหรับการวางตำแหน่งชิ้นงาน บล็อกกำหนดตำแหน่ง บล็อกชน แผ่นดันธรรมดา หมุดและปลอกกำหนดตำแหน่งแบบเปลี่ยนด่วน สกรู โบลท์ แผ่นโลหะกระเด็นกลับ ส่วนประกอบนิวเมติก วิธีการตรวจจับ
Q235-A 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 40Cr อ่างเกลือผสม HRC49-52 ระดับ 8.8, ระดับ 12.9 ทองเหลือง SMC, FESTO, AirTAC สามพิกัด
อุปกรณ์จับยึดเครื่องมือเชื่อมระดับมืออาชีพ (การปรับแต่งที่ไม่ได้มาตรฐาน)
จิ๊กเชื่อมสำหรับชิ้นส่วนเครื่องจักรกลการเกษตร
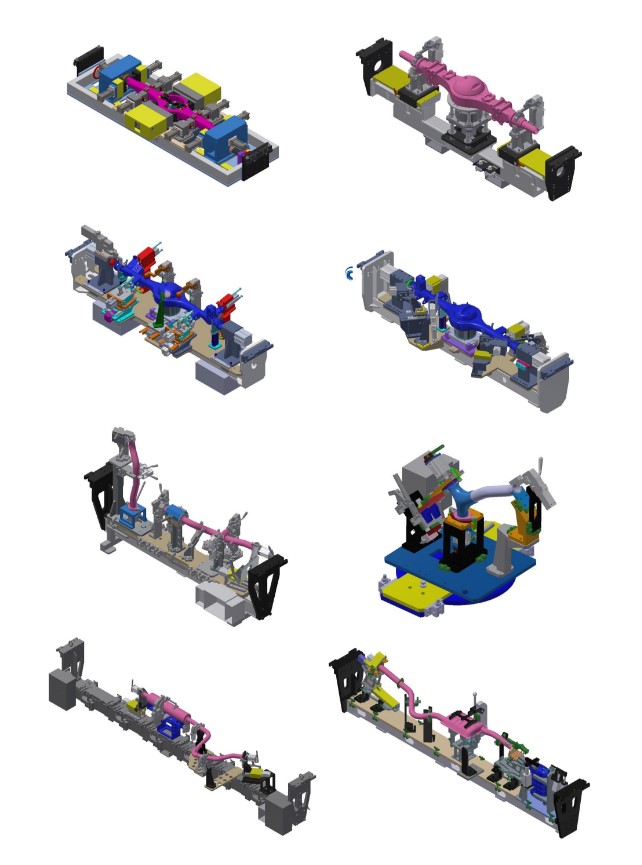
สายการผลิตเชื่อมอัจฉริยะจากโรงงาน (ไม่ได้มาตรฐาน)
สายการผลิตการเชื่อมอัจฉริยะของโรงงานเป็นระบบการผลิตที่ใช้หุ่นยนต์ อุปกรณ์เชื่อม และอุปกรณ์เสริมต่างๆ เพื่อทำให้กระบวนการเชื่อมผลิตภัณฑ์เสร็จสมบูรณ์โดยอัตโนมัติ ขึ้นอยู่กับกระบวนการเชื่อมผลิตภัณฑ์ของลูกค้าและตอบสนองจังหวะการผลิตการเชื่อม โดยคำนึงถึงการจัดการอุปสงค์และอุปทานระหว่างแต่ละกระบวนการอย่างเต็มที่ และมุ่งมั่นเพื่อให้ได้อัตราส่วนประสิทธิภาพของสายการผลิต ในขณะเดียวกันก็คำนึงถึงความประหยัด ความปลอดภัย การทำงานที่ดีและความน่าเชื่อถือในการเชื่อม ของสายการผลิต และความยืดหยุ่นสูงของสายการผลิตมากกว่าผลิตภัณฑ์โครงการมาตรฐานที่กำหนด
สายการผลิตประกอบด้วยหุ่นยนต์เชื่อมอาร์ค เครื่องเชื่อมดิจิตอล เครื่องมือจับยึดแบบนิวแมติก (ไฮดรอลิก) ตัวกำหนดตำแหน่งเซอร์โว หุ่นยนต์ขนย้าย อุปกรณ์โลจิสติกส์อัตโนมัติ อุปกรณ์ทำเครื่องหมายอัตโนมัติ อุปกรณ์ทดสอบอัตโนมัติ ระบบควบคุม PLC อุปกรณ์จดจำรหัส QR RFID ประกอบด้วย อุปกรณ์ระบุตัวตนอัจฉริยะ ระบบการจัดการ MES ของคอมพิวเตอร์ ระบบซอฟต์แวร์ฐานข้อมูล ระบบเปลี่ยนเครื่องมืออัตโนมัติ ฯลฯ เพื่อให้ตระหนักถึงการผลิตชิ้นส่วนผลิตภัณฑ์การเชื่อมแบบอัตโนมัติ ชาญฉลาด และยืดหยุ่นอย่างเต็มที่
สายการผลิตลดการแทรกแซงด้วยตนเอง ลดความเข้มข้นของแรงงานของช่างเชื่อมแบบดั้งเดิม ปรับปรุงสภาพแวดล้อมการทำงานของช่างเชื่อมแบบดั้งเดิม เปลี่ยนวิธีการทำงานของการเชื่อมแบบดั้งเดิม ปรับปรุงระดับการเชื่อมอัตโนมัติ และในขณะเดียวกันก็มอบรากฐานที่มั่นคงสำหรับการรักษาเสถียรภาพคุณภาพของผลิตภัณฑ์และ ตระหนักถึงการผลิตที่ลูกค้ากำหนดเอง การป้องกัน
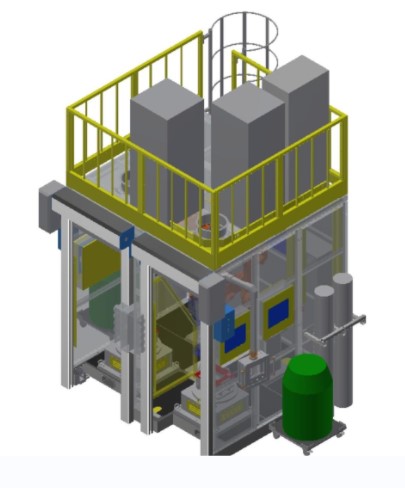
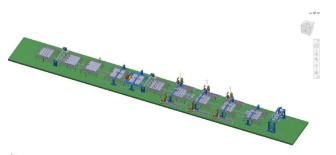
สายการผลิตการเชื่อมอัจฉริยะสำหรับโครงแขนยานพาหนะทำงานทางอากาศ
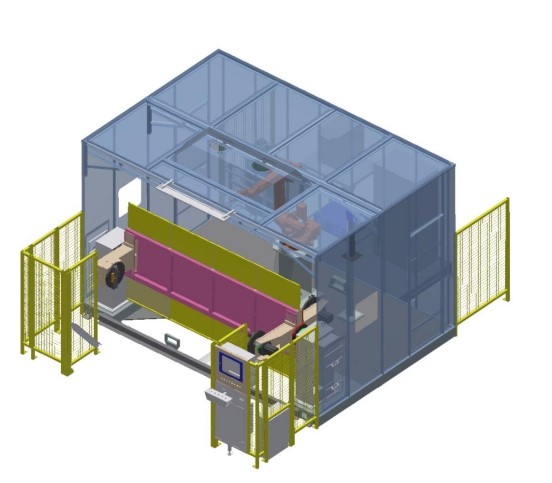
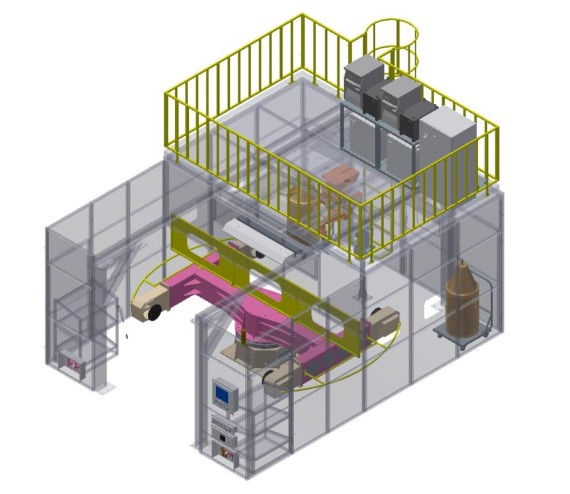
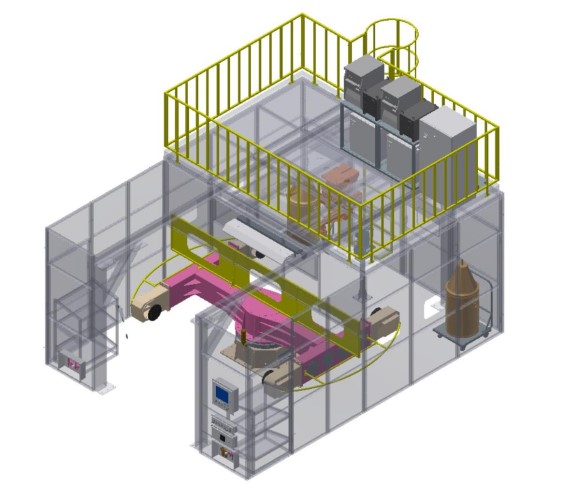
สายการผลิตเชื่อมอัจฉริยะแผ่นเสียงแขนยานพาหนะงานทางอากาศ
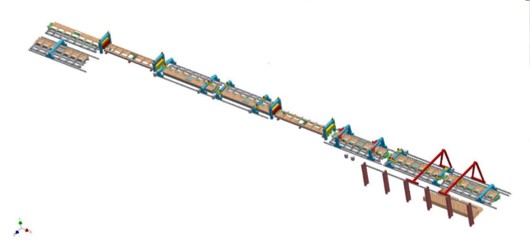
สายเชื่อมอัจฉริยะโครงรถยก

สายเชื่อมอัตโนมัติแบบ Box Beam

สถานีผสมคอนกรีต ฮอปเปอร์ สายเชื่อมอัตโนมัติ
ผนังกั้น Gondola (ประตูท้ายรถบรรทุกหนัก) สายเชื่อมอัตโนมัติ
ผนังด้านข้างกอนโดลา (ประตูด้านข้างรถบรรทุกหนัก) สายการผลิตเชื่อมอัตโนมัติ
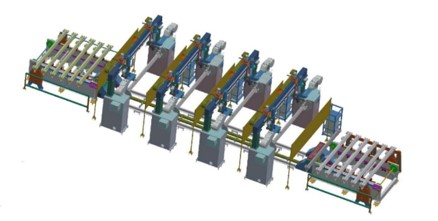
ทาวเวอร์เครนคอร์ดหลักสายเชื่อมอัตโนมัติ
ระบบข้อมูลการผลิตอัจฉริยะ
ระบบข้อมูลการผลิตอัจฉริยะ (ระบบ MES) คือชุดของระบบการจัดการข้อมูลการผลิตที่มุ่งเน้นไปที่ระดับการดำเนินการของการประชุมเชิงปฏิบัติการขององค์กรการผลิต
ระบบ MES ช่วยให้องค์กรต่างๆ ได้รับการจัดการข้อมูลการผลิต การวางแผนและการจัดการกำหนดเวลา การจัดการกำหนดการผลิต การจัดการสินค้าคงคลัง การจัดการคุณภาพ การจัดการทรัพยากรมนุษย์ การจัดการศูนย์งาน/อุปกรณ์ การจัดการเครื่องมือและเครื่องมือ การจัดการการจัดซื้อ การจัดการต้นทุน การจัดการโครงการ Kanban การควบคุมกระบวนการผลิต การวิเคราะห์การรวมข้อมูลระดับล่าง การรวมข้อมูลระดับบนและการสลายตัว และโมดูลการจัดการอื่นๆ จะสร้างแพลตฟอร์มการจัดการความร่วมมือด้านการผลิตที่แข็งแกร่ง เชื่อถือได้ ครอบคลุมและเป็นไปได้สำหรับองค์กร
โมดูลการทำงาน
1. การติดตามการผลิต
2. การรวบรวมข้อมูล
3. การจัดการกระบวนการ
4. การจัดการคุณภาพ
5. การจัดการรายงาน
6. กำหนดการผลิต
7 ข้อมูลพื้นฐาน
8. การวิเคราะห์ตัวบ่งชี้ OEE
9. การบริหารเงินเดือน
10. การแบ่งปันข้อมูล
11. การมอบหมายงาน
12. การวิเคราะห์ความสมดุลของความสามารถ

การแสดงสรุปข้อมูลสายการผลิต / การแสดงสรุปการจัดการการผลิต

โครงสร้างระบบ / ข้อมูลอุปกรณ์และการรวบรวมและแสดงพารามิเตอร์การเชื่อม / การแสดงสถานะการทำงานของอุปกรณ์

การตั้งเวลาด้วยตนเอง / การจัดการใบสั่งผลิต
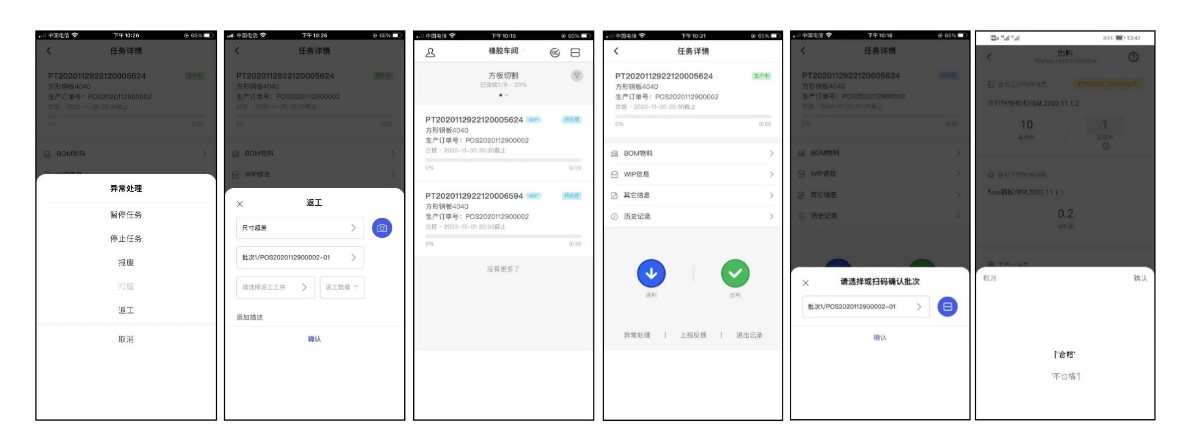
การดำเนินการแก้ไข1 / การดำเนินการปรับปรุง 2 / การดำเนินการผลิต 1 / การดำเนินการผลิต 2 / การดำเนินการผลิต 3 / การดำเนินการตรวจสอบคุณภาพ /
กรณี
01. รถยนต์พลังงานใหม่

02.รถยนต์เพื่อการพาณิชย์ดัดแปลง

03.เครื่องจักรก่อสร้าง
04.โครงสร้างเหล็ก

05. ภาชนะรับความดัน

06.เครื่องจักรกลการเกษตร

07.อุปกรณ์ป้องกันสิ่งแวดล้อม

08.ไฟฟ้าโซลาร์เซลล์
สายการผลิตการประมวลผล IngIntelligent สำหรับแท่งซิลิคอนโมโนคริสตัลไลน์

09.โลหะวิทยา
สายการผลิตอัจฉริยะเพลารถไฟความเร็วสูง
